智能汽车
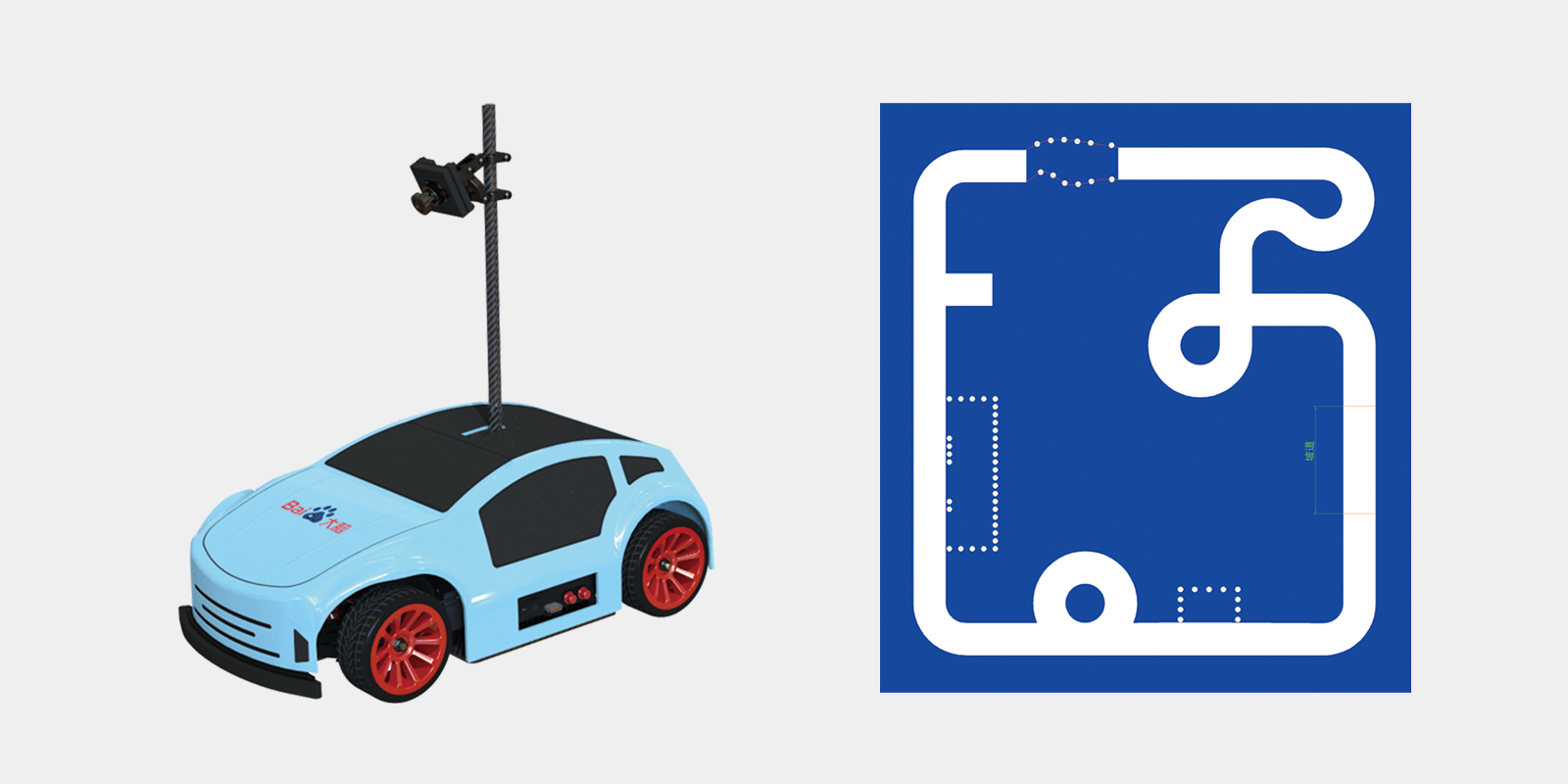
智能汽车完成人工智能、无人驾驶、图像处理与运控控制等相关课程的学习,理论+实践共48课时。支持C++/Python语言编程,基于百度飞桨(PaddlePaddle)AI框架和OpenCV图像处理技术,实现在线AI模型训练、移动端部署、赛道识别与交通标志检测,车辆控制以及巡线导航等功能。产品采用双主控架构,控制主板为Edgeboard计算卡,负责复杂算法和图像处理工作,控制单元为GD32系列单片机,负责智能汽车运动传感器数据采集、电机控制等工作,并具备摄像头、编码器、电量计等传感器。
智能控制、图像处理、赛道识别、自动驾驶,支持C++/Python二次开发。
情景化教学,将理论与实践教学相结合。
赛事版本支持全国大学生智能汽车竞赛等多项赛事。
智能汽车课程属于人工智能在汽车领域的应用课程,课程将理论与实践教学相结合,遵循软硬件一体化教学的系统思路,从系统搭建到多场景下的实际任务应用, 完整展现了智能汽车的硬件组成、软件编程、算法调试、模型训练等全方位技术,具有理论体系完整、真实场景教学、实操性强等特点,使学生真正学有所获。
| 章 | 节 |
|---|---|
| 第一章 认识智能汽车 | 1.1 自动驾驶技术导论 |
| 1.2 竞赛车模架构 | |
| 1.3 实训:智能汽车配置实验 | |
| 第二章 车辆架构与控制 | 2.1 环境感知与传感器应用 |
| 2.2 嵌入式系统概览 | |
| 2.3 车辆运动控制系统与通信协议 | |
| 2.4 实训:智能汽车图像感知实验 | |
| 第三章 赛道图像采集与预处理 | 3.1计算机视觉应用与图像采集技术 |
| 3.2 实训:图像采集实验 | |
| 3.3 相机标定基本原理 | |
| 3.4 实训:相机标定与图像校正实验 | |
| 3.5 图像校正技术原理 | |
| 3.6 实训:赛道图像的透视变换实验 | |
| 3.7 图像预处理技术基础:灰度化与二值化 | |
| 3.8 图像预处理技术基础:去噪与增强 | |
| 3.9 实训:赛道图像预处理实践 | |
| 第四章 赛道元素识别模型训练 | 4.1人工智能基础 |
| 4.2 神经网络与深度学习概述 | |
| 4.3 实训:基于飞桨平台的赛道元素识别模型训练实验 | |
| 第五章 赛道检测与识别 | 5.1 图像识别技术概述 |
| 5.2 车辆行驶路径搜索策略 | |
| 5.3 赛道识别的基本方法 | |
| 5.4 实训:赛道与环岛识别实验 | |
| 5.5 实训:十字路口与车库识别实验 | |
| 5.6 实训:泛行区赛道识别实验 | |
| 5.7 基于深度学习的检测方法 | |
| 5.8 实训:智能汽车AI模型部署实验 | |
| 5.9 实训:基于AI的赛道元素检测与识别实验 | |
| 第六章 智能汽车控制与决策 | 6.1 路径规划技术概览 |
| 6.2 速度姿态与智能控制 | |
| 6.3 实训:智能汽车控制与决策实验 | |
| 第七章 智能汽车竞技实战 | 7.1 实训:智能汽车行驶竞技实战 |
本课程定位于人工智能、计算机、车辆控制相关专业高等院校学生,有兴趣参加全国大学生智能汽车竞赛的在校大学生。

