智能汽车
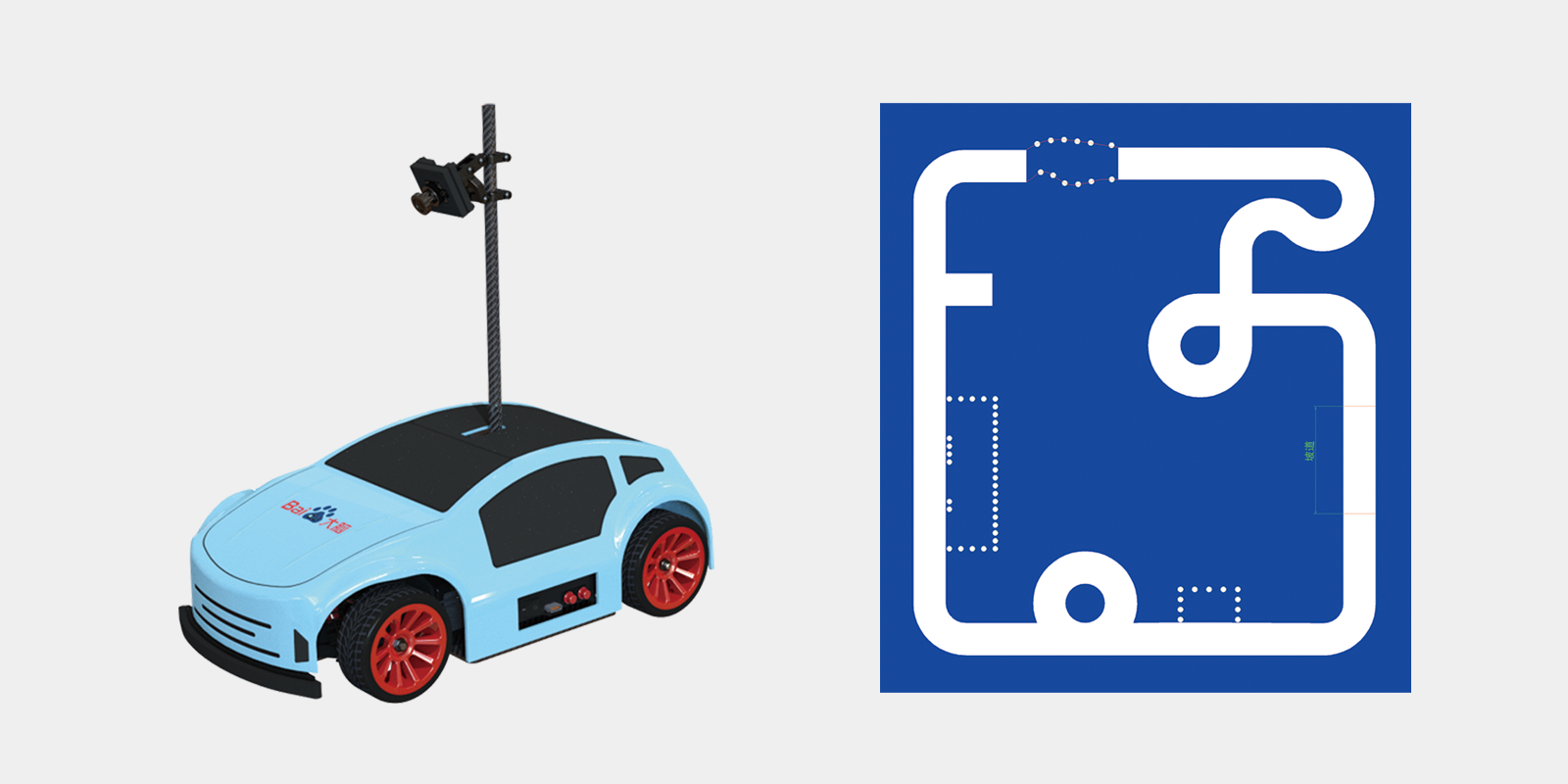
智能汽车完成人工智能、无人驾驶、图像处理与运控控制等相关课程的学习,理论+实践共48课时。支持C++/Python语言编程,基于百度飞桨(PaddlePaddle)AI框架和OpenCV图像处理技术,实现在线AI模型训练、移动端部署、赛道识别与交通标志检测,车辆控制以及巡线导航等功能。产品采用双主控架构,控制主板为Edgeboard计算卡,负责复杂算法和图像处理工作,控制单元为GD32系列单片机,负责智能汽车运动传感器数据采集、电机控制等工作,并具备摄像头、编码器、电量计等传感器。
智能汽车课程属于人工智能在汽车领域的应用课程,课程将理论与实践教学相结合,遵循软硬件一体化教学的系统思路,从系统搭建到多场景下的实际任务应用, 完整展现了智能汽车的硬件组成、软件编程、算法调试、模型训练等全方位技术,具有理论体系完整、真实场景教学、实操性强等特点,使学生真正学有所获。
| 章 | 节 |
|---|---|
| 第一章 认识智能汽车 | 1.1 自动驾驶技术导论 |
| 1.2 竞赛车模架构 | |
| 1.3 实训:智能汽车配置实验 | |
| 第二章 车辆架构与控制 | 2.1 环境感知与传感器应用 |
| 2.2 嵌入式系统概览 | |
| 2.3 车辆运动控制系统与通信协议 | |
| 2.4 实训:智能汽车图像感知实验 | |
| 第三章 赛道图像采集与预处理 | 3.1计算机视觉应用与图像采集技术 |
| 3.2 实训:图像采集实验 | |
| 3.3 相机标定基本原理 | |
| 3.4 实训:相机标定与图像校正实验 | |
| 3.5 图像校正技术原理 | |
| 3.6 实训:赛道图像的透视变换实验 | |
| 3.7 图像预处理技术基础:灰度化与二值化 | |
| 3.8 图像预处理技术基础:去噪与增强 | |
| 3.9 实训:赛道图像预处理实践 | |
| 第四章 赛道元素识别模型训练 | 4.1人工智能基础 |
| 4.2 神经网络与深度学习概述 | |
| 4.3 实训:基于飞桨平台的赛道元素识别模型训练实验 | |
| 第五章 赛道检测与识别 | 5.1 图像识别技术概述 |
| 5.2 车辆行驶路径搜索策略 | |
| 5.3 赛道识别的基本方法 | |
| 5.4 实训:赛道与环岛识别实验 | |
| 5.5 实训:十字路口与车库识别实验 | |
| 5.6 实训:泛行区赛道识别实验 | |
| 5.7 基于深度学习的检测方法 | |
| 5.8 实训:智能汽车AI模型部署实验 | |
| 5.9 实训:基于AI的赛道元素检测与识别实验 | |
| 第六章 智能汽车控制与决策 | 6.1 路径规划技术概览 |
| 6.2 速度姿态与智能控制 | |
| 6.3 实训:智能汽车控制与决策实验 | |
| 第七章 智能汽车竞技实战 | 7.1 实训:智能汽车行驶竞技实战 |
基础参数包含智能汽车基本参数与赛道场地基本参数。
| 类别 | 名称 | 参数 |
|---|---|---|
| 智能汽车基础参数 | 尺寸 | 316*190*110mm(不含摄像头碳奸杆) 316*190*310mm(含摄像头碳纤杆) |
| 系统环境 | Linux系统 | |
| 控制主板 | EdgeBoard板卡 | |
| 控制单元 | GD32系列单片机 | |
| 转向方式 | 舵机控制阿克曼转向 | |
| 最小转弯半径 | 25cm | |
| 动力布局 | 单电机后驱 | |
| 电机 | 直流高速电机,额定电压12V,空载转速12000rpm | |
| 舵机 | 高精度数字舵机0.14Sec/60° | |
| 最大速度 | 10m/s | |
| 电池 | 3S25C锂电池,标称11.1V,容量2200mAh | |
| 摄像头 | 640*480分辨率 30万像素摄像头 | |
| 轮胎 | 橡胶轮胎 | |
| 车壳 | 工程塑料 | |
| 通信方式 | 支持Ethernet,USB、UART | |
| 赛道场地 | 材质 | PVC |
| 尺寸 | 三种规格:7.5m*8m;7.5m*5.5m;4m*5m | |
| 坡道 | 木质150cm*60cm*14cm | |
| 路肩 | 厚度2cm;宽度2.5cm;长度25cm | |
| 锥桶 | 直径74mm;高度74mm; | |
| 标定板 | 21cm*29.7cm | |
| 实体标志 | 若干(见下表) |
| 产品名称 | 序号 | 内容清单 | 每套数量 |
|---|---|---|---|
| 智能汽车 SASU-ICTA | |||
| 1 | 智能汽车实验箱 | 1 | |
| 2 | 电源适配器 | 1 | |
| 3 | 网线 | 1 | |
| 4 | 遥控手柄 | 1 | |
| 5 | Type-c充电线 | 1 | |
| 6 | 实验箱资料U盘 | 1 | |
| 7 | 十字螺丝刀 | 1 | |
| 8 | 十字内六角套筒 | 1 | |
| 9 | 内六角L型扳手 | 1 | |
| 10 | 合格证 | 1 | |
| 11 | 保修卡 | 1 | |
| 12 | 教师课程资料包 | 1 | |
| 智能汽车赛道 SASU-ICCA | |||
| 1 | PVC赛道 | 1 | |
| 2 | 工业胶带(黑与白) | 1 | |
| 3 | 班马线 | 1 | |
| 4 | 围挡 | 1 | |
| 5 | 锥桶 | 56 | |
| 6 | 坡道 | 1 | |
| 7 | 坡道标志 | 1 | |
| 8 | 标定板 | 1 | |
| 9 | 车辆维护区标志 | 1 | |
| 10 | 农田标志 | 1 | |
| 11 | 减速带 | 4 | |
| 12 | 动物出没标志 | 1 | |
| 13 | 坡道标志 | 1 | |
| 14 | 粮仓标志 | 2 | |
| 15 | 车辆维护区标志 | 1 |
| 名称 | 数量 | 名称 | 数量 |
|---|---|---|---|
| 智能汽车 | *1 | 工具套件 | *1 |
| 手柄遥控器 | *1 | 电源适配器 | *1 |
| USB无线网线 | *1 | 裁判系统 | *1 |
| U盘 | *1 | 赛道场地 | *1 |
| 产品名称 | 序号 | 内容清单 | 数量 |
|---|---|---|---|
| 智能汽车 | 1 | 智能汽车实验箱 | 1 |
| 2 | 电源适配器 | 1 | |
| 3 | 网线 | 1 | |
| 4 | 键盘鼠标 | 1 | |
| 5 | 遥控手柄 | 1 | |
| 6 | 电池 | 2 | |
| 7 | USB无线网卡 | 1 | |
| 8 | Type-c充电线 | 1 | |
| 9 | 实验箱资料U盘 | 1 | |
| 10 | 十字螺丝刀 | 1 | |
| 11 | 十字内六角套筒 | 1 | |
| 12 | 内六角L型扳手 | 1 | |
| 13 | 内六角L型扳手 | 1 | |
| 14 | 合格证 | 1 | |
| 15 | 保修卡 | 1 | |
| 16 | 教师课程资料包 | 1 | |
| 智能汽车赛道 | 1 | PVC赛道 | 1 |
| 2 | 坡道 | 1 | |
| 3 | 坡道标志 | 1 | |
| 4 | 标定板 | 1 | |
| 5 | 泛行区标志 | 1 | |
| 6 | 禁止通行标志 | 1 | |
| 7 | 施工区标志 | 1 | |
| 8 | 坡道标志 | 1 | |
| 9 | 加油站标志 | 1 | |
| 10 | 加油站出口数字标志“1” | 1 | |
| 11 | 加油站出口数字标志“2” | 1 |

