ROS系统高阶平台
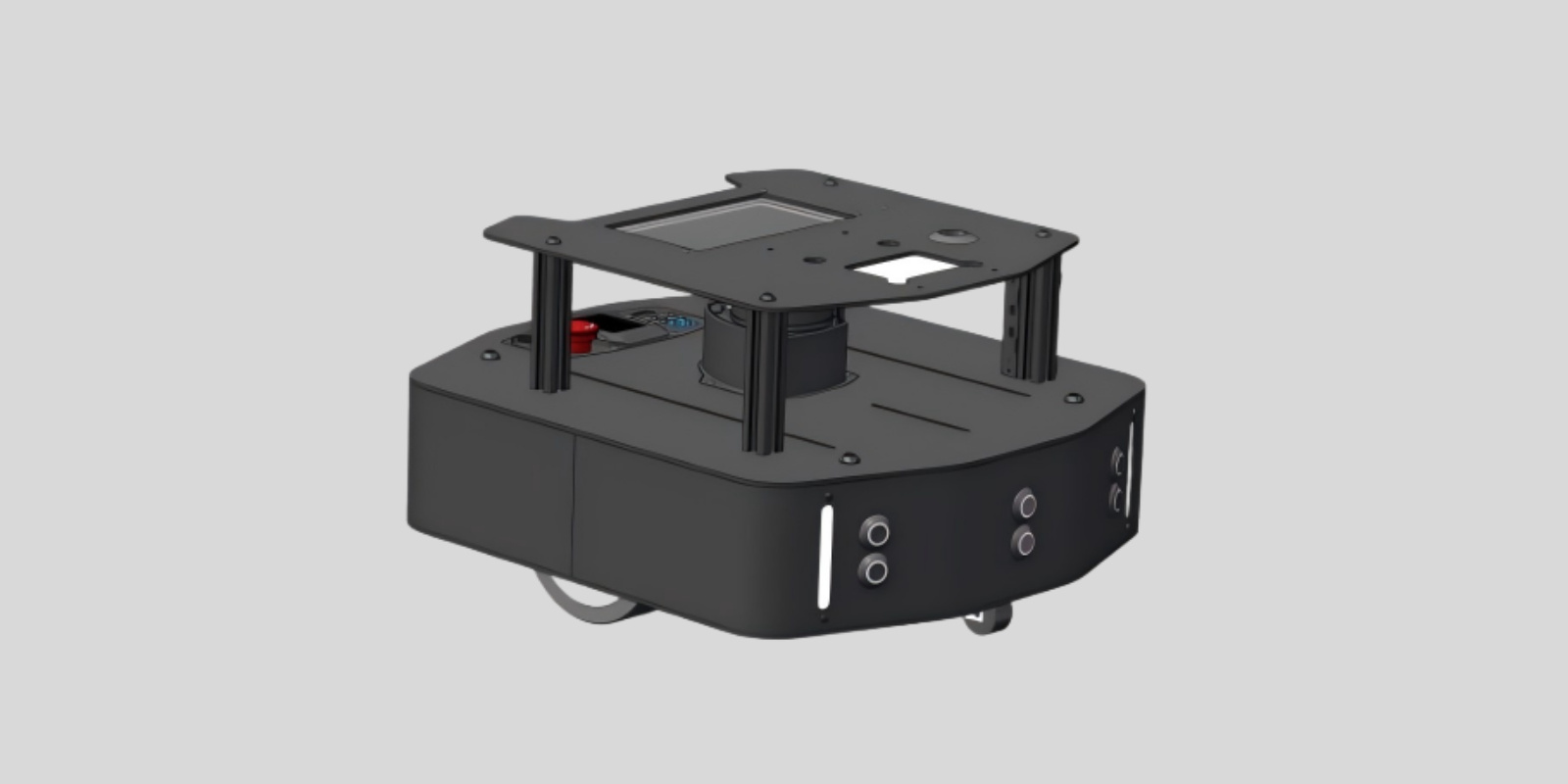
ROS系统高阶平台以ROS机器人为核心载体,在实操演示机器人建图、定位导航、路径规划等核心功能的过程中,逐步掌握ROS系统开发技能。该机器人采用模块化设计理念,通过 “化繁为简”的结构优化,大幅降低学习入门门槛,帮助学习者更高效地构建系统性的 ROS开发知识框架。同时,课程配套了完整的学习支持体系 —— 不仅提供实体机器人平台供实操练习,还包含详尽的课程资料包(涵盖课程指南、学习指导书、实训手册、教学课件、示例资料库及考核资料等),全方位满足授课与自主学习需求。
支持多种编程语言开发,拥有强大的开源社区,学生可在编程的世界里充分自由发挥。
依托“ROS系统机器人高阶版”实训平台,以ROS系统机器人高阶版为载体,系统开展创建工作空间、通信测试、TF文件架构、建图、定位导航与综合调试等实践, 促进学生对ROS系统机器人专业知识的掌握和创新型应用。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 ROS架构与特点概述 |
| 1.2 ROS学习方法与开源社区资源 | |
| 1.3 实训: ROS开发环境部署 | |
| 第二章 ROS文件系统与功能包 | 2.1 ROS文件系统架构 |
| 2.2 ROS功能包的应用技巧 | |
| 第三章 ROS机器人通信机制 | 3.1 ROS通信体系架构 |
| 3.2 ROS通信方式方法 | |
| 3.3 实训:机器人通信实践 | |
| 第四章 机器人坐标系(TF) | 4.1 TF与TF-tree |
| 4.2 机器人坐标系构建 | |
| 4.3 实训:机器人坐标系(TF)构建实践 | |
| 第五章 机器人SLAM建图 | 5.1 SLAM与机器人软硬件架构 |
| 5.2 Gmapping算法原理 | |
| 5.3 实训:机器人建图实践 | |
| 第六章 移动机器人定位导航 | 6.1 定位导航算法原理 |
| 6.2 Navigation算法解析 | |
| 6.3 实训:机器人定位导航实践 | |
| 第七章 ROS机器人系统设计 | 7.1 ROS机器人系统功能设计思路 |
| 7.2 机器人电子设计与软件设计方法 | |
| 7.3 实训: 亲手搭建一套ROS机器人系统 | |
| 第八章 ROS机器人调试策略 | 8.1 实训:ROS机器人综合调试一 |
| 8.2 实训:ROS机器人综合调试二 |
本课程定位于高职高专、本科院校机器人、智能制造、自动化、计算机相关专业的专业实践课。

