对抗机器人
"对抗机器人"包含电铲系列、气铲系列、机械臂系列以及特色系列,是结构设计复杂、控制系统简单通用的机电控制系统。 其中机器人的运动控制由电子电路控制系统实现,通过无线遥控、运动电路系统控制、攻击机构控制实现机器人控制、机器人运动以及攻击等功能。
通过体验式教学,依托不同结构系列机器人,能够实现不同行走机构、不同攻击机构、不同特色功能机器人的设计、开发、调试与应用, 在实际设计与组装过程中,便于学生快速、全面掌握竞技机器人开发知识内容。课程衔接机器人相关赛事,可作为各项赛事指导课程。
产品介绍
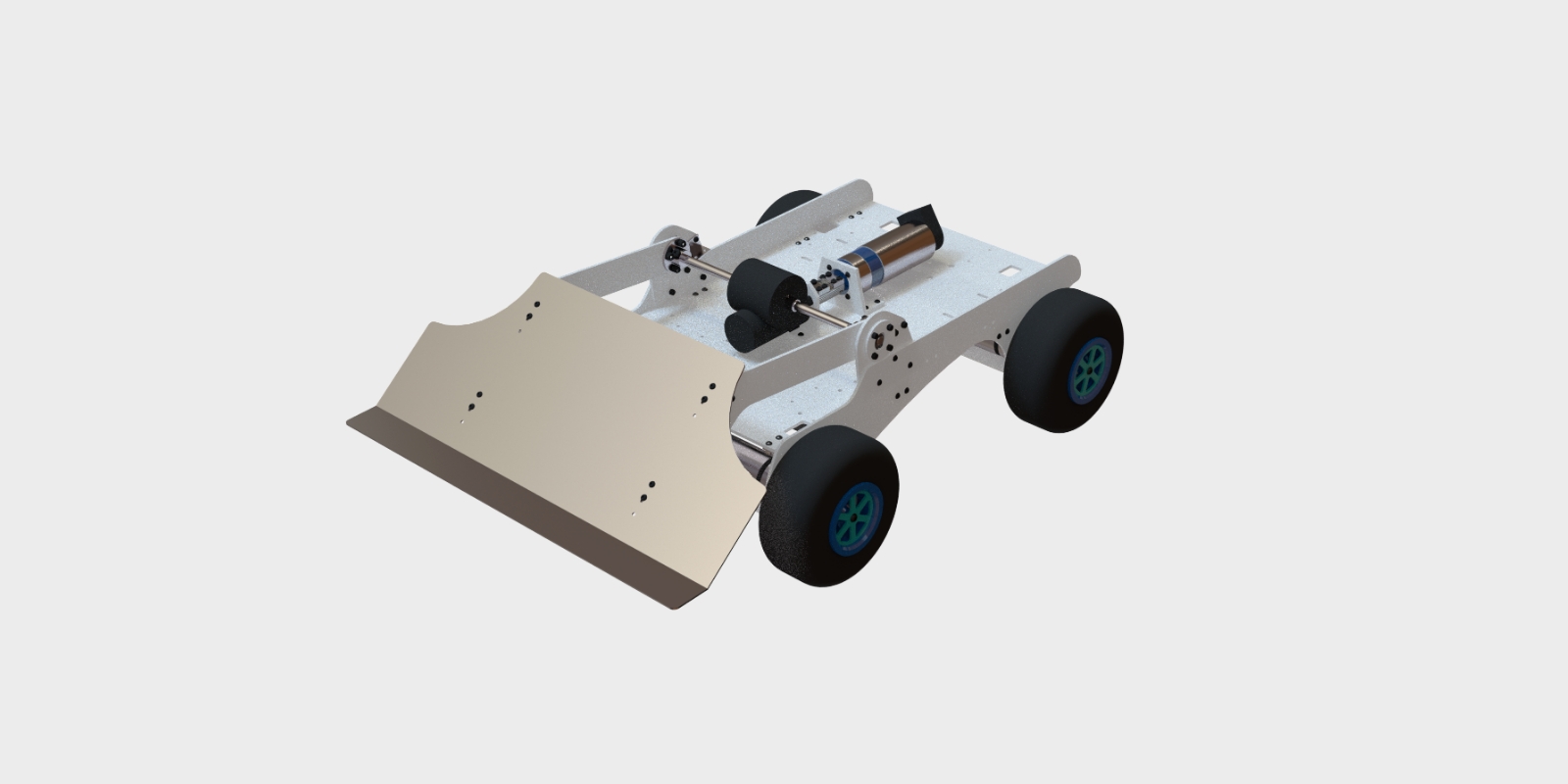
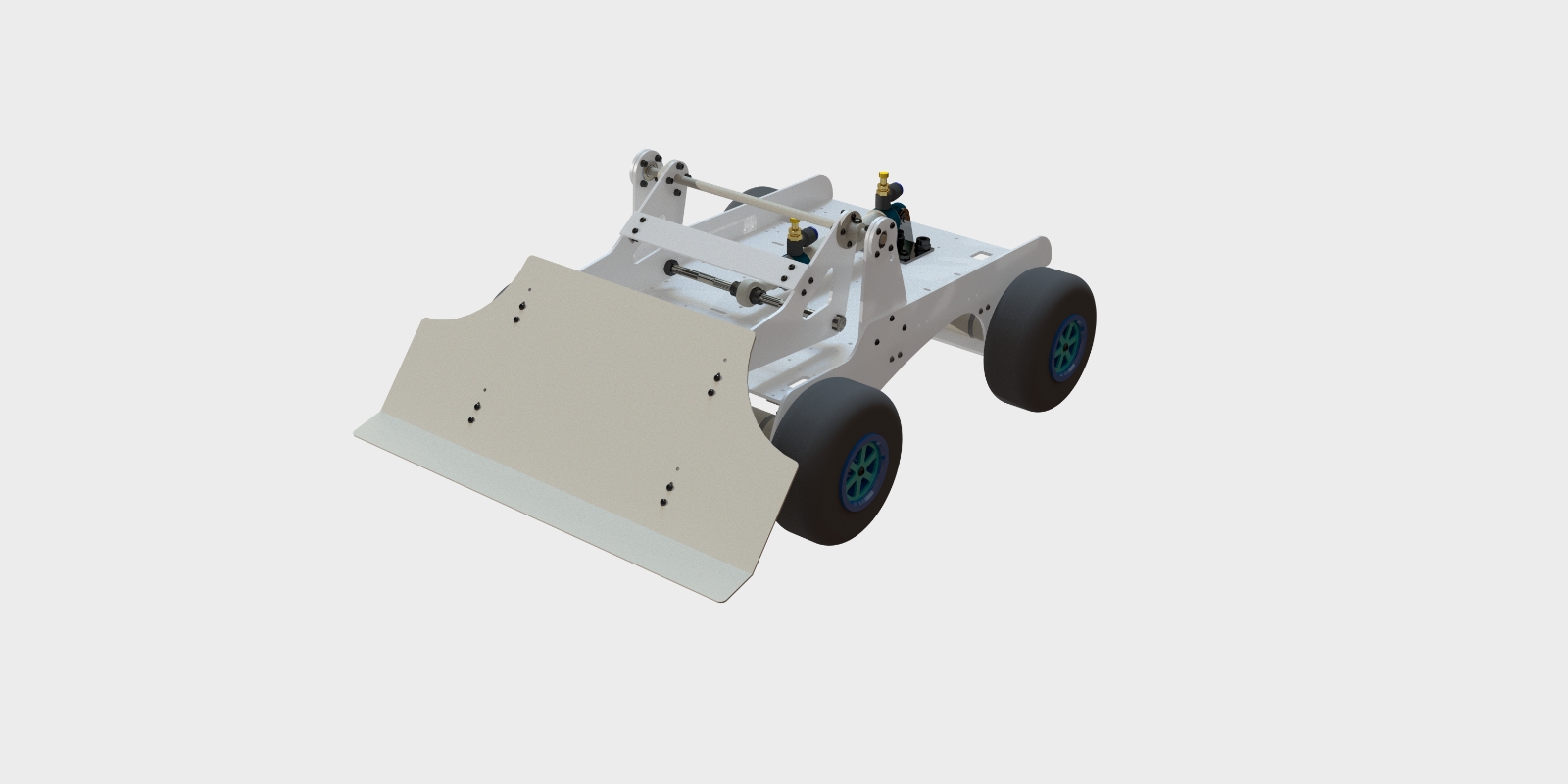
电铲标准轮式对抗机器人讲解电铲机器人的机械设计、运动控制、电铲控制原理。机器人搭配标准尺寸轮毂底盘。课程内容分为:应用场景需求分析,底盘运动学结构设计和控制原理、电铲式机械结构设计和控制原理,机器人应用对抗实践。
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力,电控系统搭建能力等。 对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课与综合实践课,适合有一定专业学习基础、 致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |
产品介绍
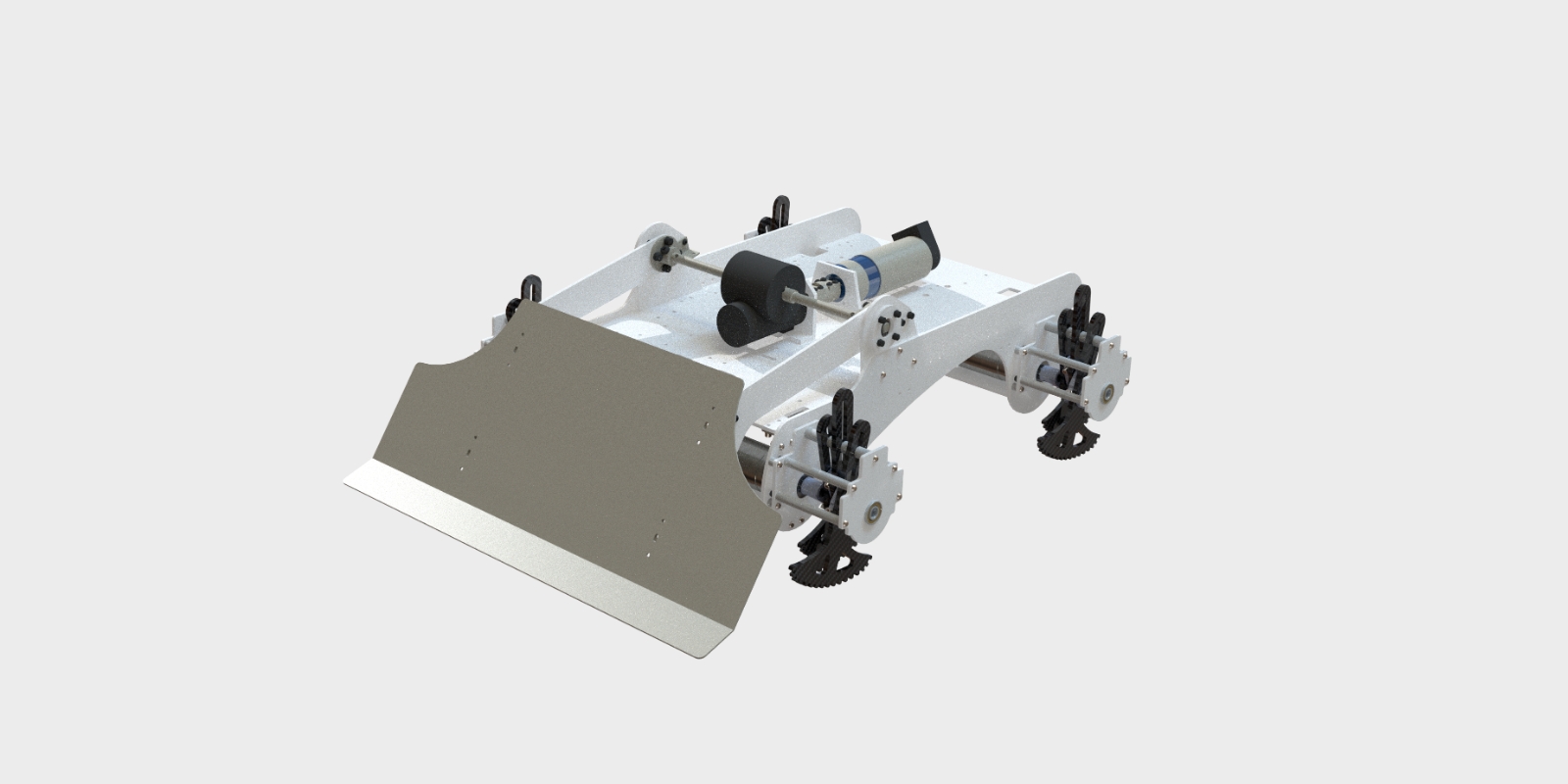
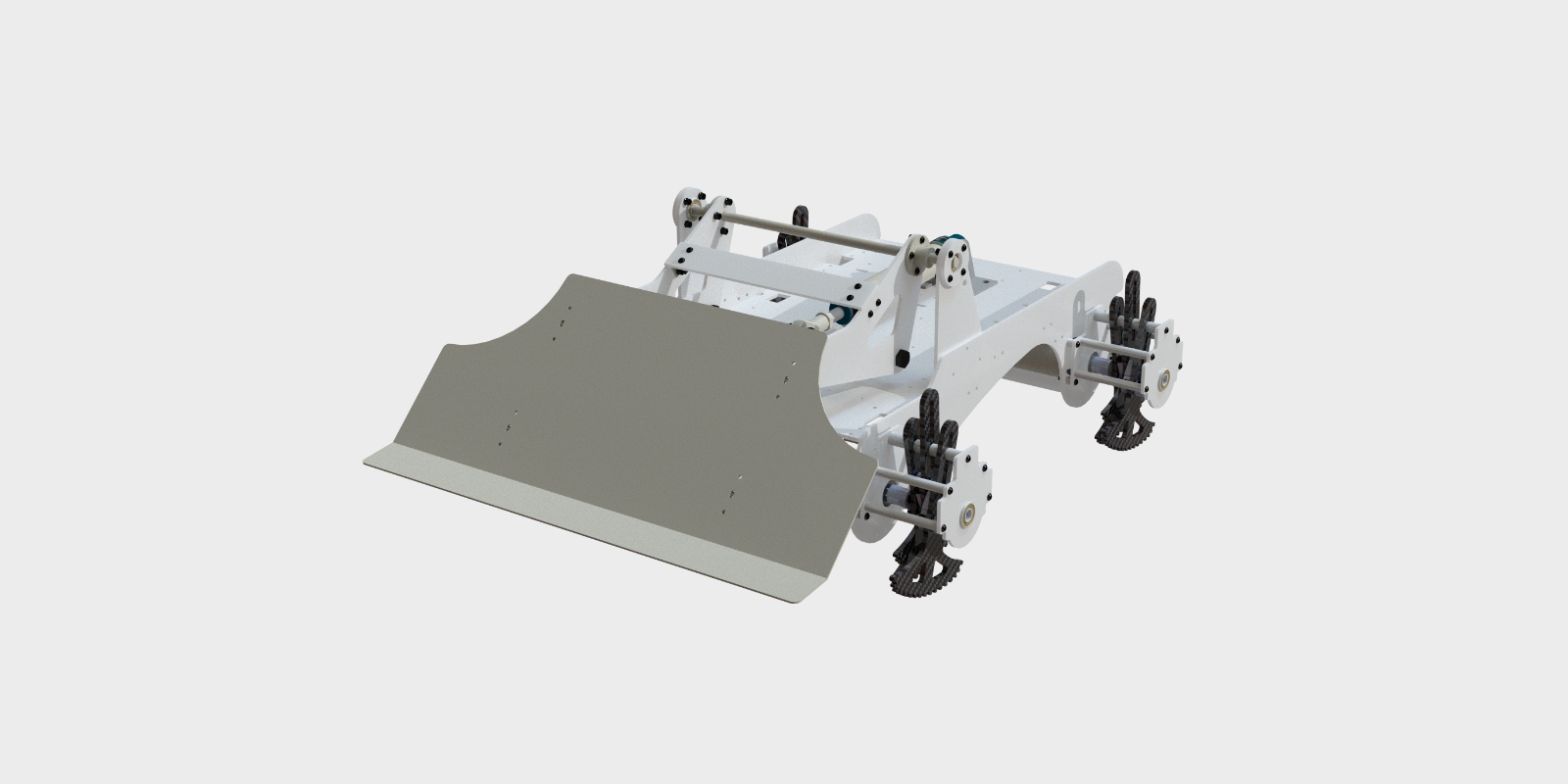
电铲船足对抗机器人讲解了电铲机器人的机械设计、运动控制、电铲控制原理。机器人搭配仿生船足底盘。课程内容分为:应用场景需求分析,底盘运动学结构设计和控制原理、电铲式机械结构设计和控制原理,机器人应用对抗实践。
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力,电控系统搭建能力等。 对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课与综合实践课,适合有一定专业学习基础、 致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |
产品介绍
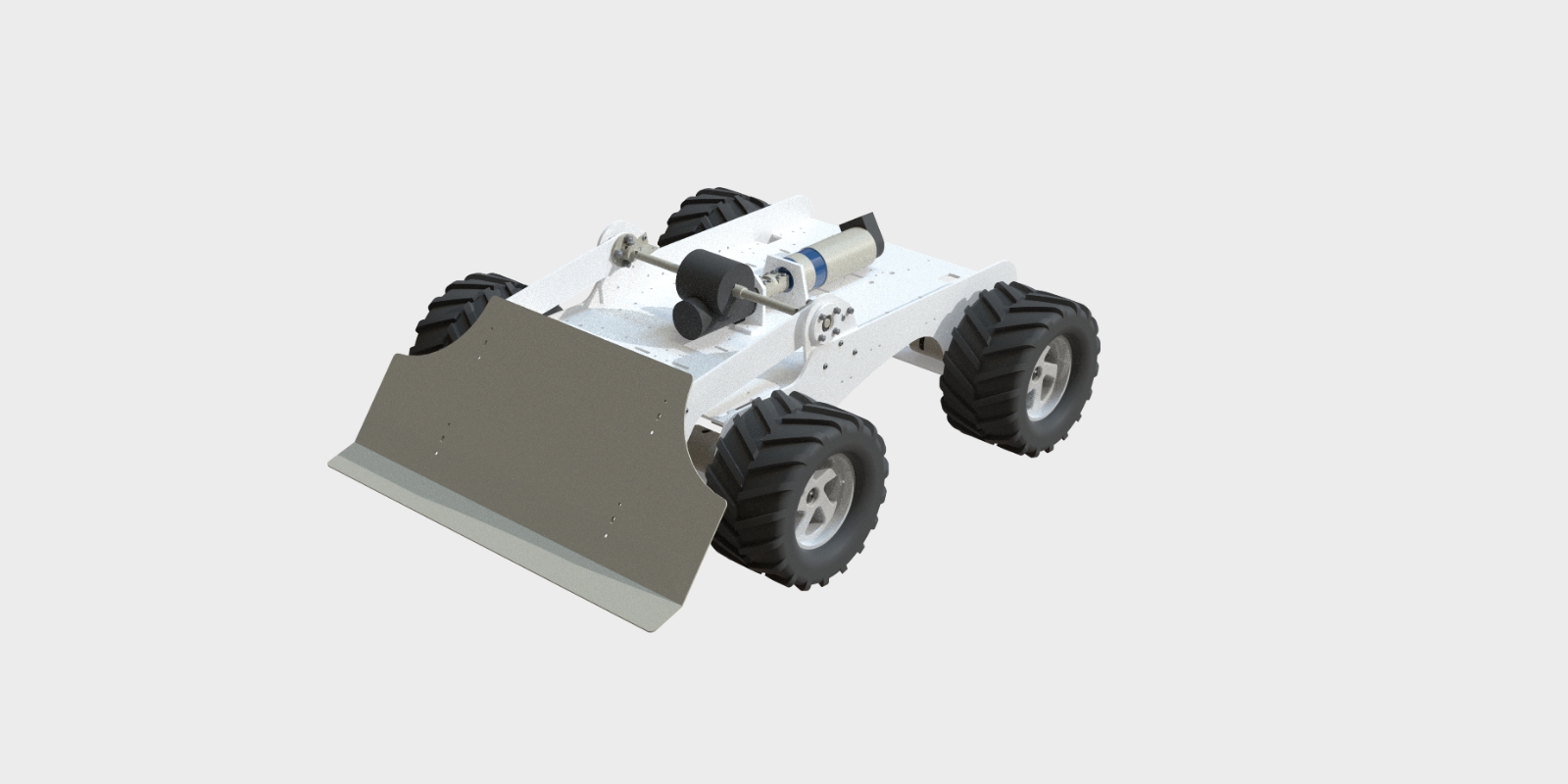
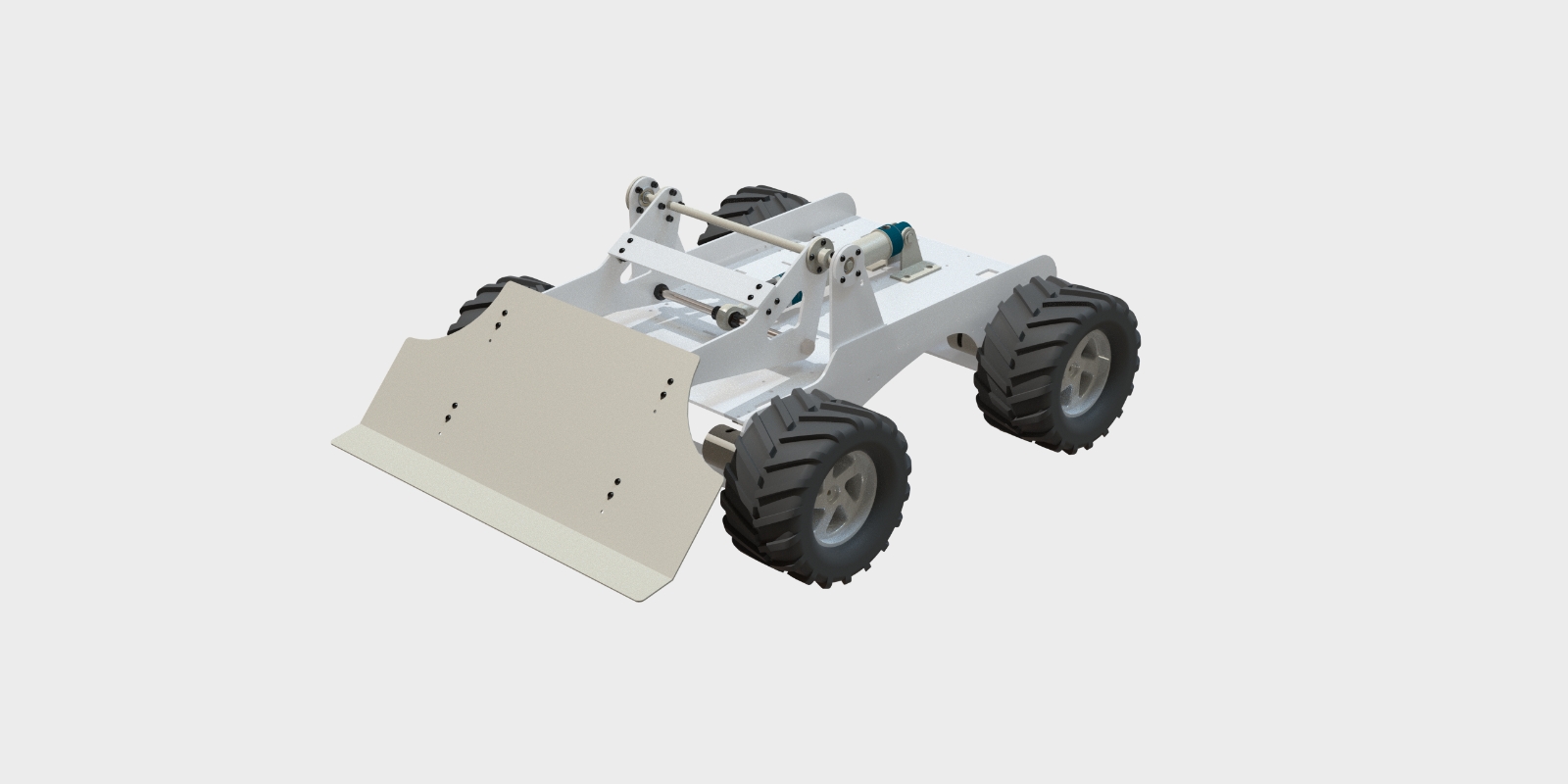
电铲越野轮式对抗机器人讲解电铲机器人的机械设计、运动控制、电铲控制原理。机器人搭配标准尺寸轮毂底盘。课程内容分为:应用场景需求分析,底盘运动学结构设计和控制原理、电铲式机械结构设计和控制原理,机器人应用对抗实践。
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力,电控系统搭建能力等。 对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课与综合实践课,适合有一定专业学习基础、 致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |
产品介绍
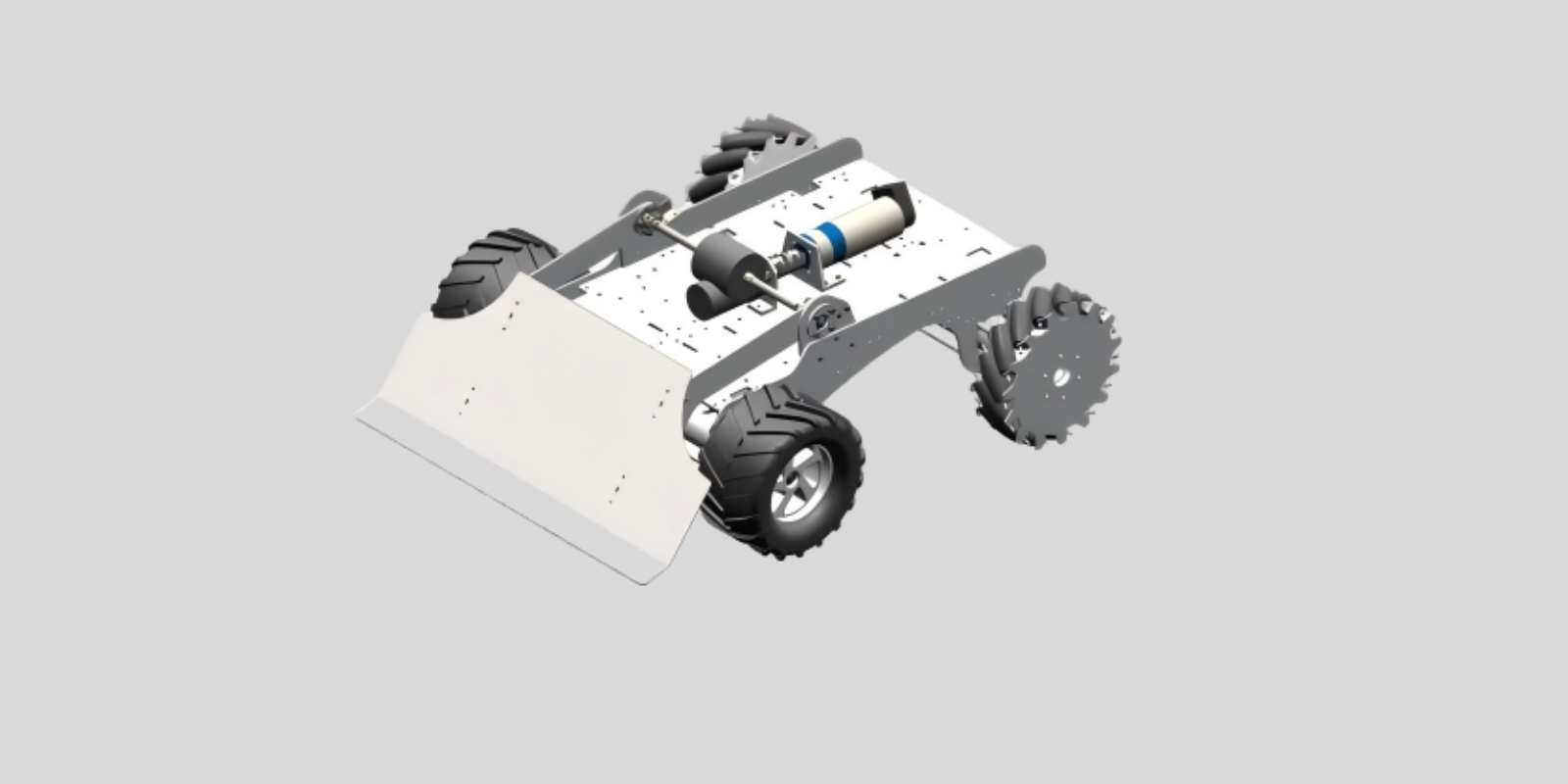
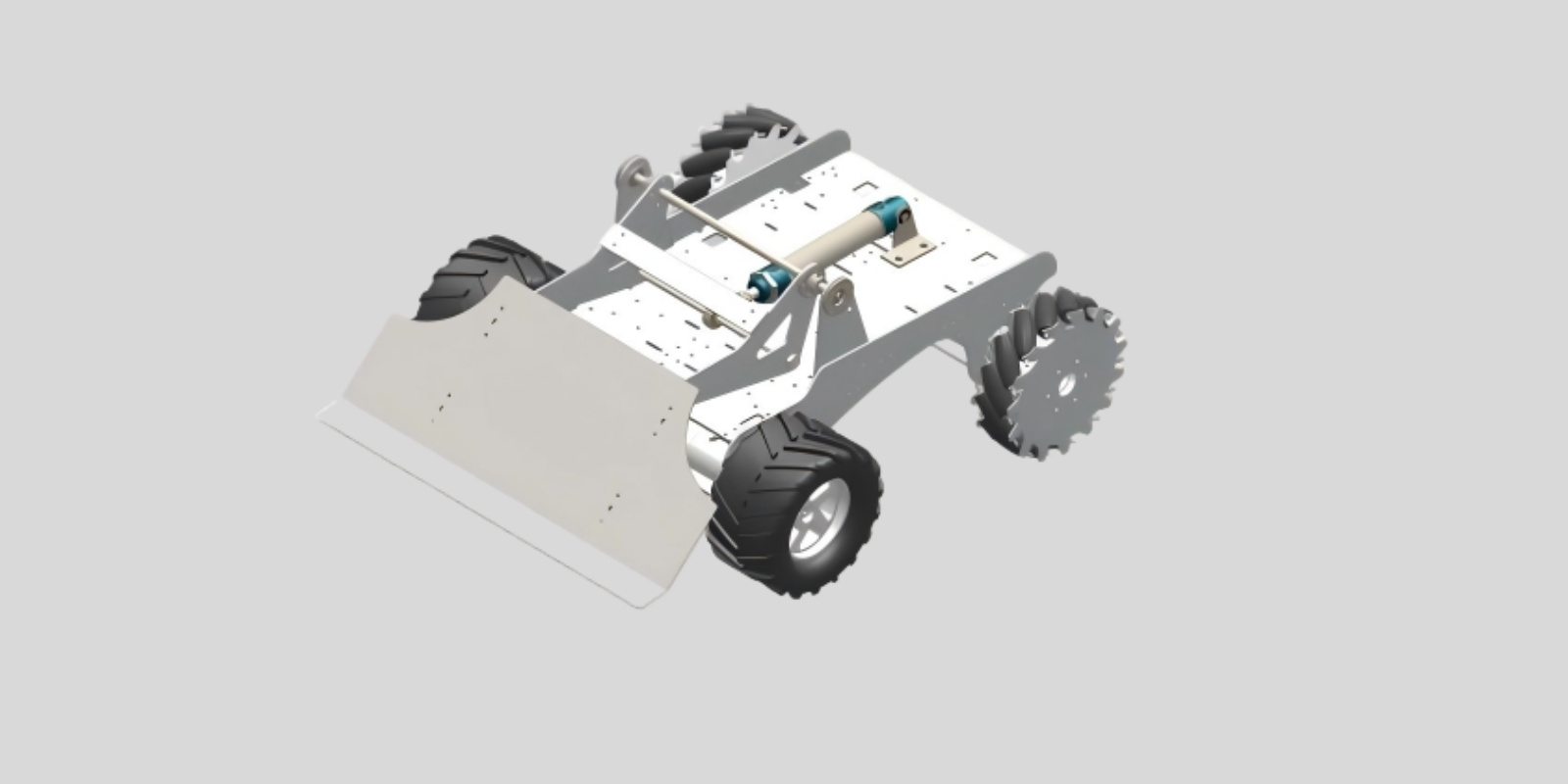
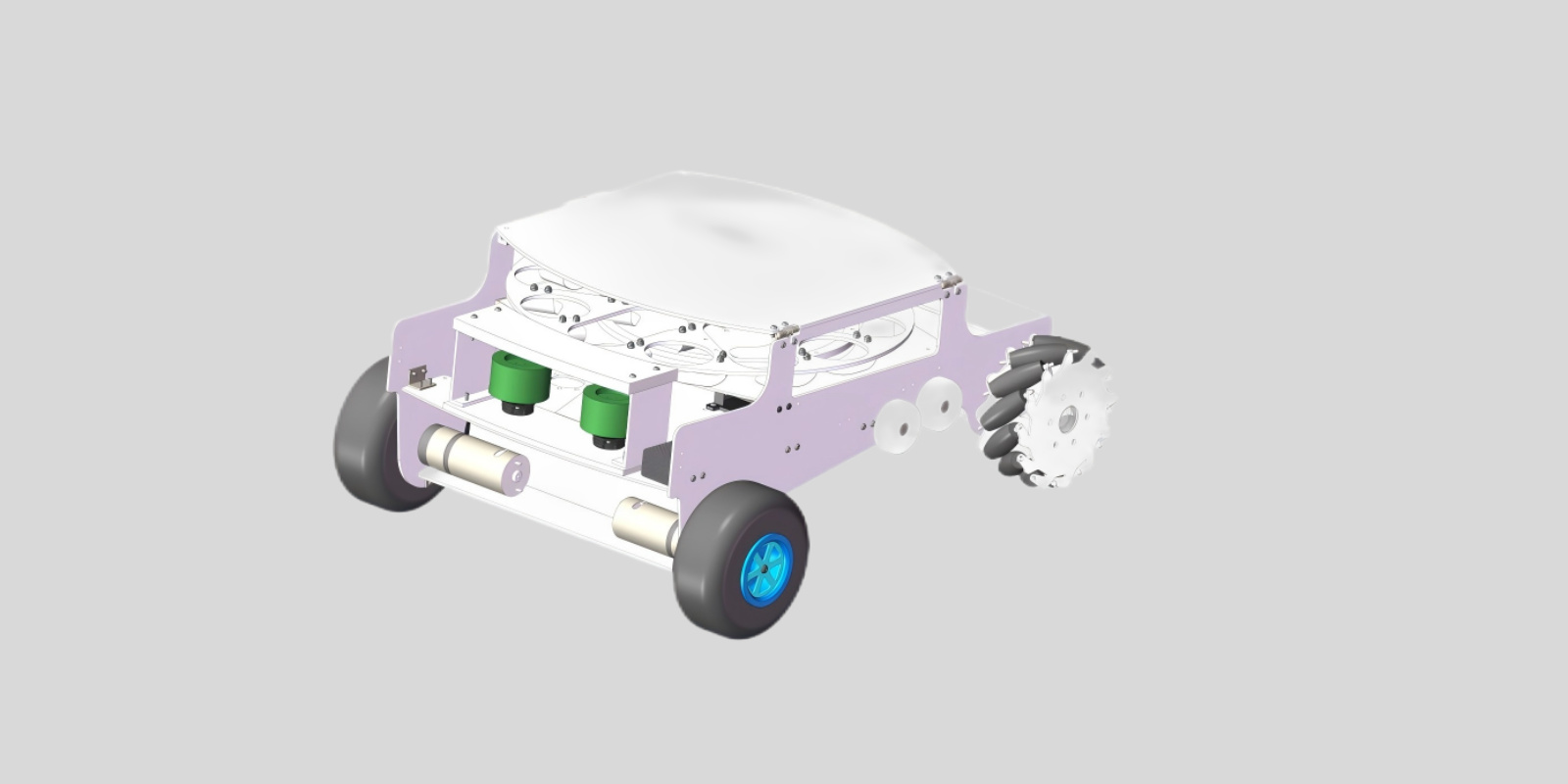
电铲麦轮对抗机器人讲解电铲机器人的机械设计、运动控制、电铲控制原理。机器人搭配标准尺寸麦轮。课程内容分为:应用场景需求分析,底盘运动学结构设计和控制原理、电铲式机械结构设计和控制原理,机器人应用对抗实践。
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力,电控系统搭建能力等。 对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课与综合实践课,适合有一定专业学习基础、 致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |
产品介绍
气铲标准轮式对抗机器人讲解气铲机器人的机械设计、运动控制、气铲控制原理。机器人搭配标准尺寸轮毂底盘。课程内容分为:应用场景需求分析,底盘运动学结构设计和控制原理、气铲式机械结构设计和控制原理,机器人应用对抗实践。
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力,电控系统搭建能力等。 对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课与综合实践课,适合有一定专业学习基础、 致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |
产品介绍
气铲船足对抗机器人讲解气铲机器人的机械设计、运动控制、气铲控制原理。机器人搭配仿生船足底盘。课程内容分为:应用场景需求分析,底盘运动学结构设计和控制原理、气铲式机械结构设计和控制原理,机器人应用对抗实践。
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力,电控系统搭建能力等。 对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课与综合实践课,适合有一定专业学习基础、 致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |
产品介绍
气铲越野轮式对抗机器人讲解气铲机器人的机械设计、运动控制、气铲控制原理。机器人搭配越野轮毂底盘。课程内容分为:应用场景需求分析,底盘运动学结构设计和控制原理、气铲式机械结构设计和控制原理,机器人应用对抗实践。
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力,电控系统搭建能力等。 对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课与综合实践课,适合有一定专业学习基础、 致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |
产品介绍
气铲麦轮对抗机器人讲解气铲机器人的机械设计、运动控制、气铲控制原理。机器人搭配标准尺寸麦轮。课程内容分为:应用场景需求分析,底盘运动学结构设计和控制原理、气铲式机械结构设计和控制原理,机器人应用对抗实践。
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力,电控系统搭建能力等。 对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课与综合实践课,适合有一定专业学习基础、 致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |
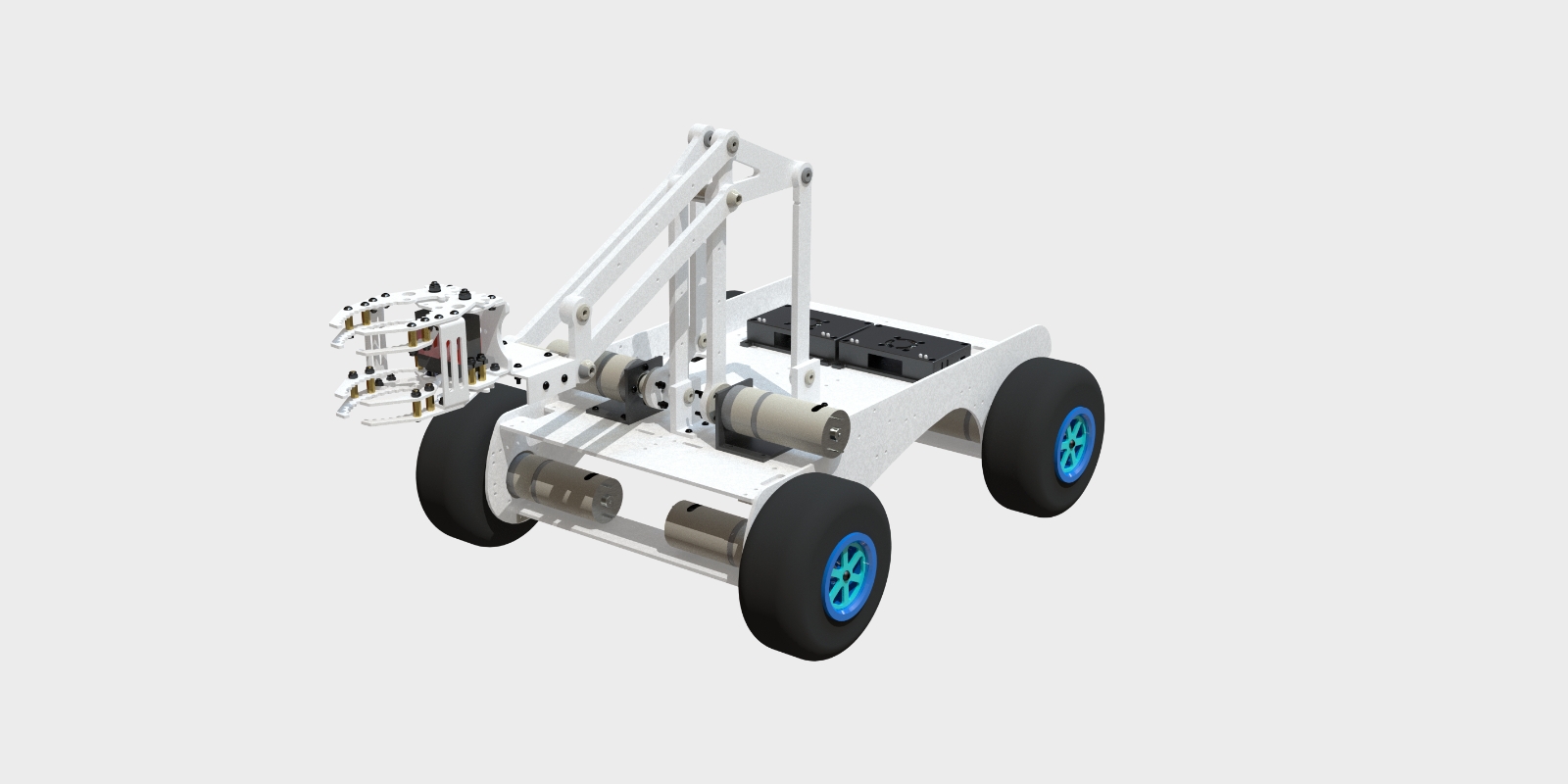
产品介绍
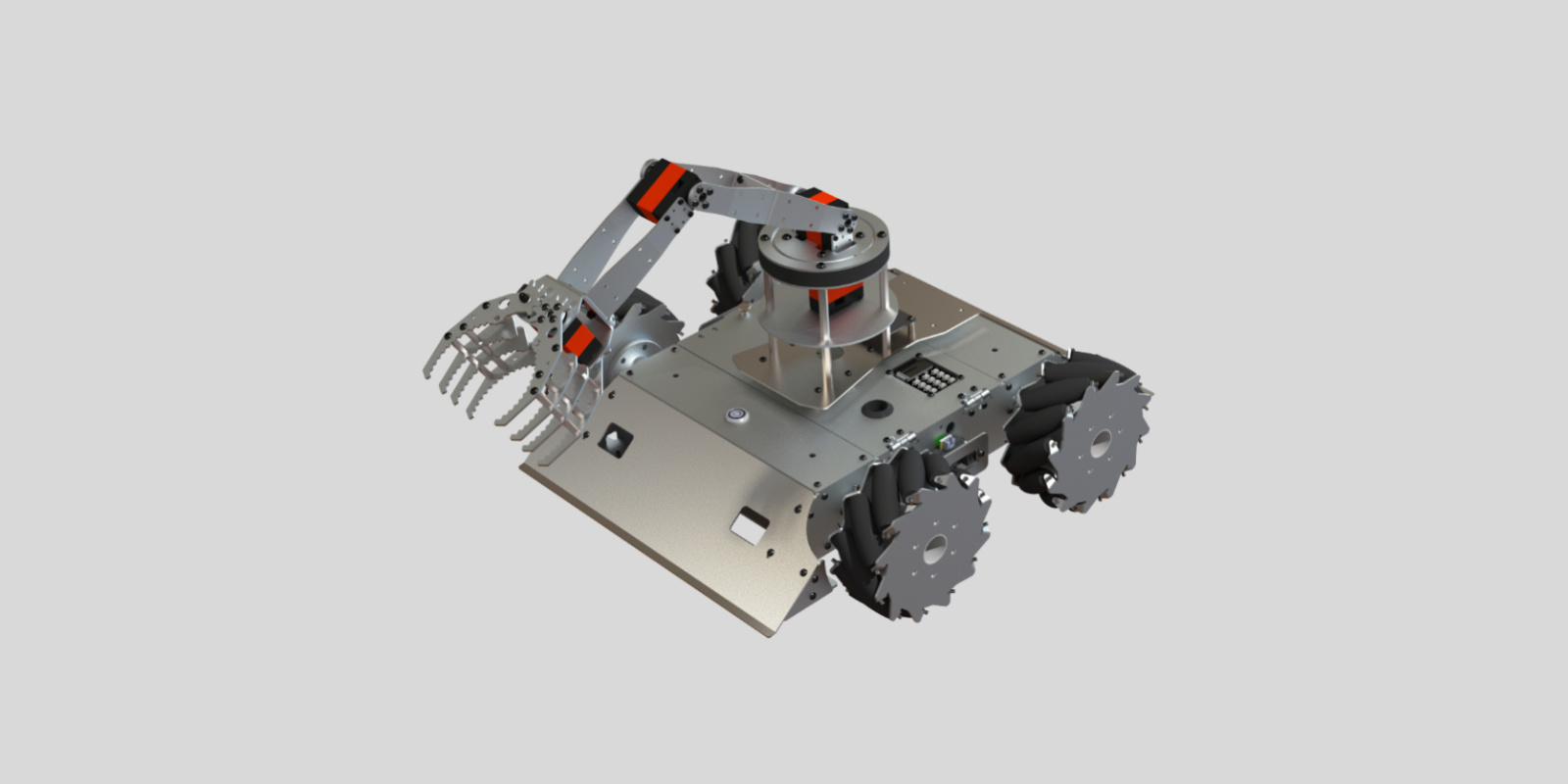
机械臂标准轮式对抗机器人讲解独臂机器人的机械设计、运动控制、独臂控制原理。机器人搭配标准尺寸轮毂底盘。课程内容分为:应用场景需求分析,底盘运动学结构设计和控制原理、独臂式机械结构设计和控制原理,机器人应用对抗实践。
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力, 电控系统搭建能力等。对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课 与综合实践课,适合有一定专业学习基础、致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |
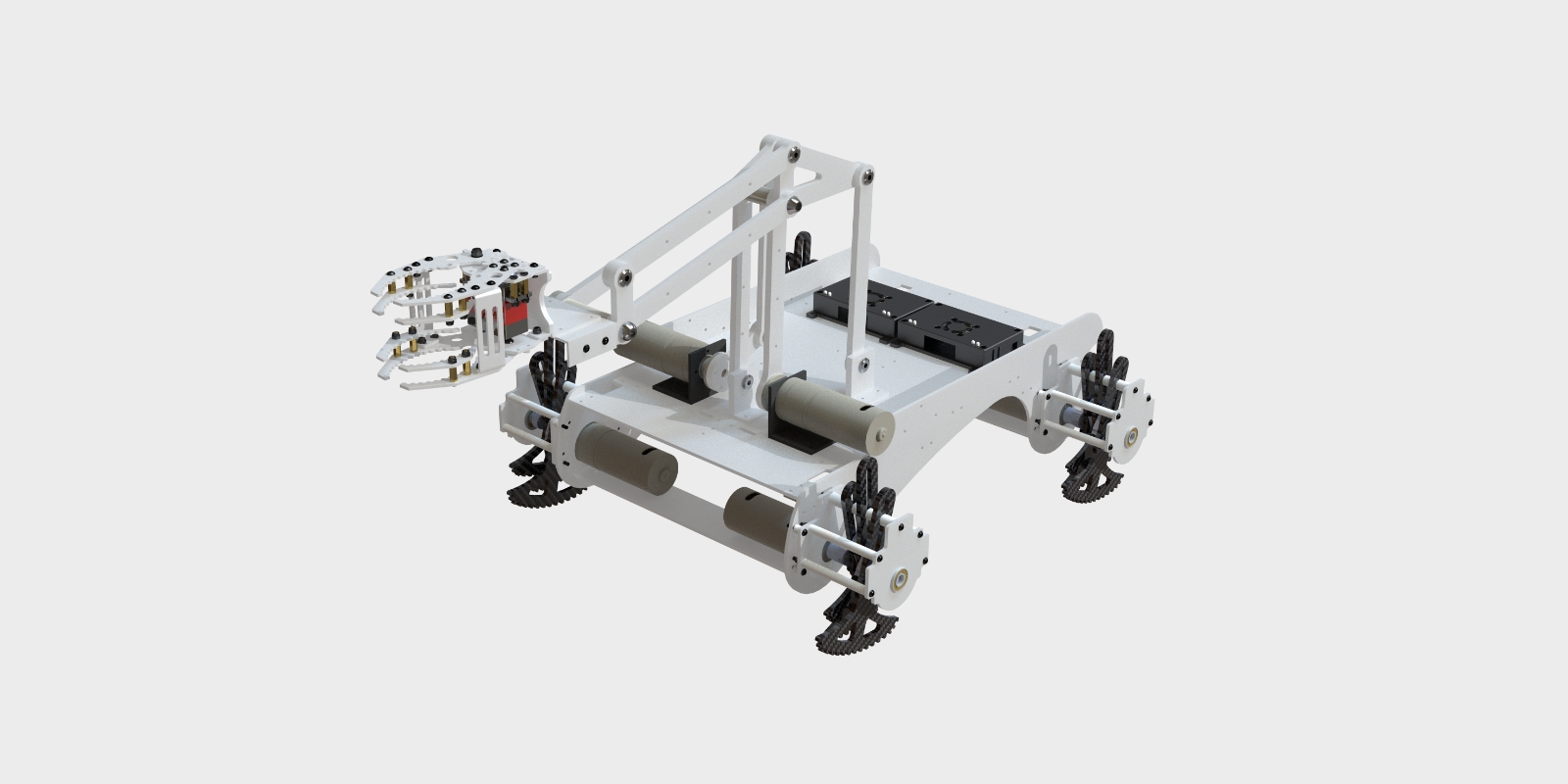
产品介绍
机械臂船足对抗机器人讲解独臂机器人的机械设计、运动控制、独臂控制原理。机器人搭配仿生船足底盘。课程内容分为:应用场景需求分析,底盘运动学结构设计和控制原理、独臂式机械结构设计和控制原理,机器人应用对抗实践。
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力, 电控系统搭建能力等。对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课 与综合实践课,适合有一定专业学习基础、致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |

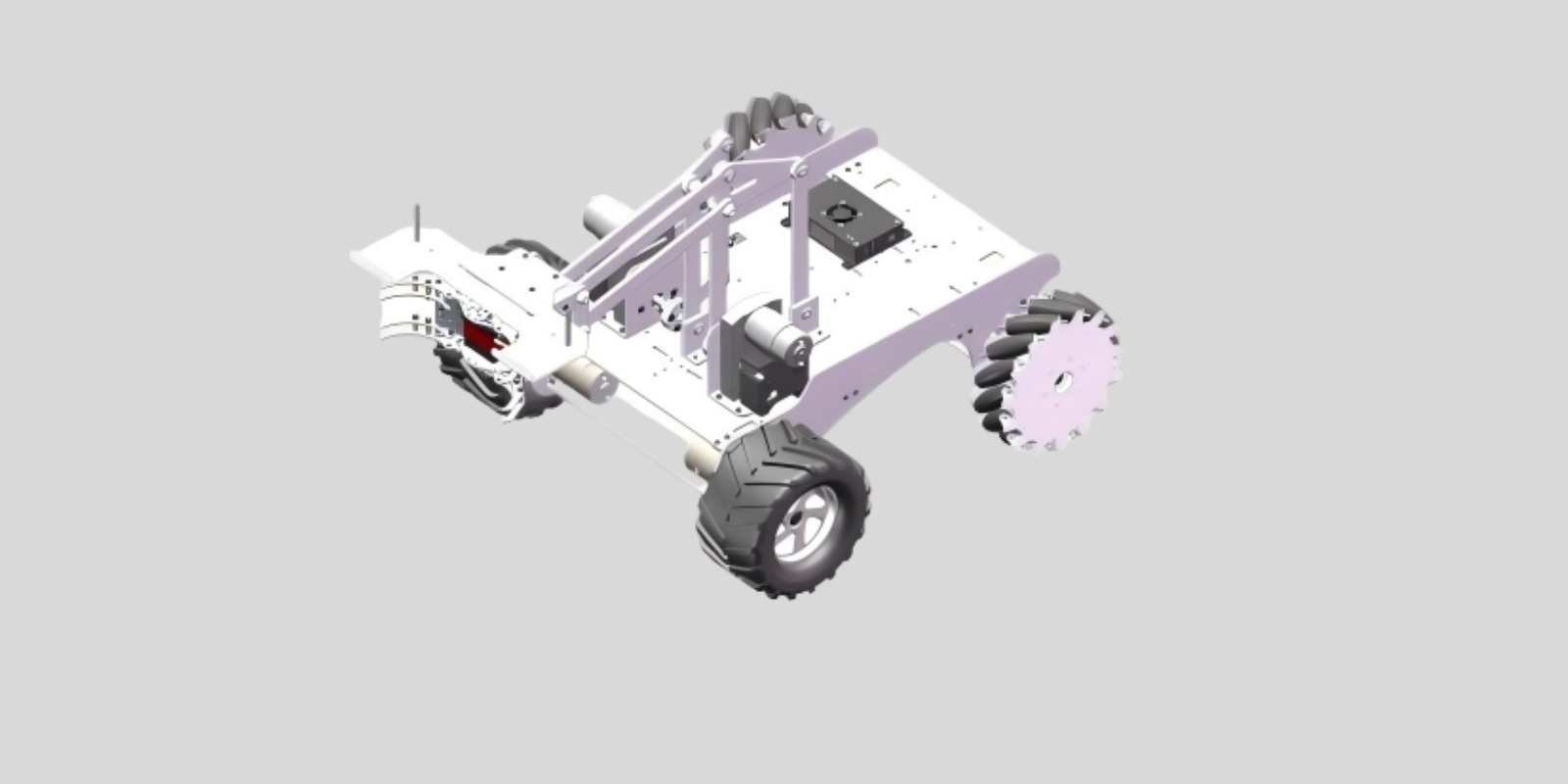
产品介绍
机械臂越野轮式对抗机器人讲解独臂机器人的机械设计、运动控制、独臂控制原理。机器人搭配越野轮毂底盘。课程内容分为:应用场景需求分析,底盘运动学结构设计和控制原理、独臂式机械结构设计和控制原理,机器人应用对抗实践。
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力, 电控系统搭建能力等。对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课 与综合实践课,适合有一定专业学习基础、致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力, 电控系统搭建能力等。对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课 与综合实践课,适合有一定专业学习基础、致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |
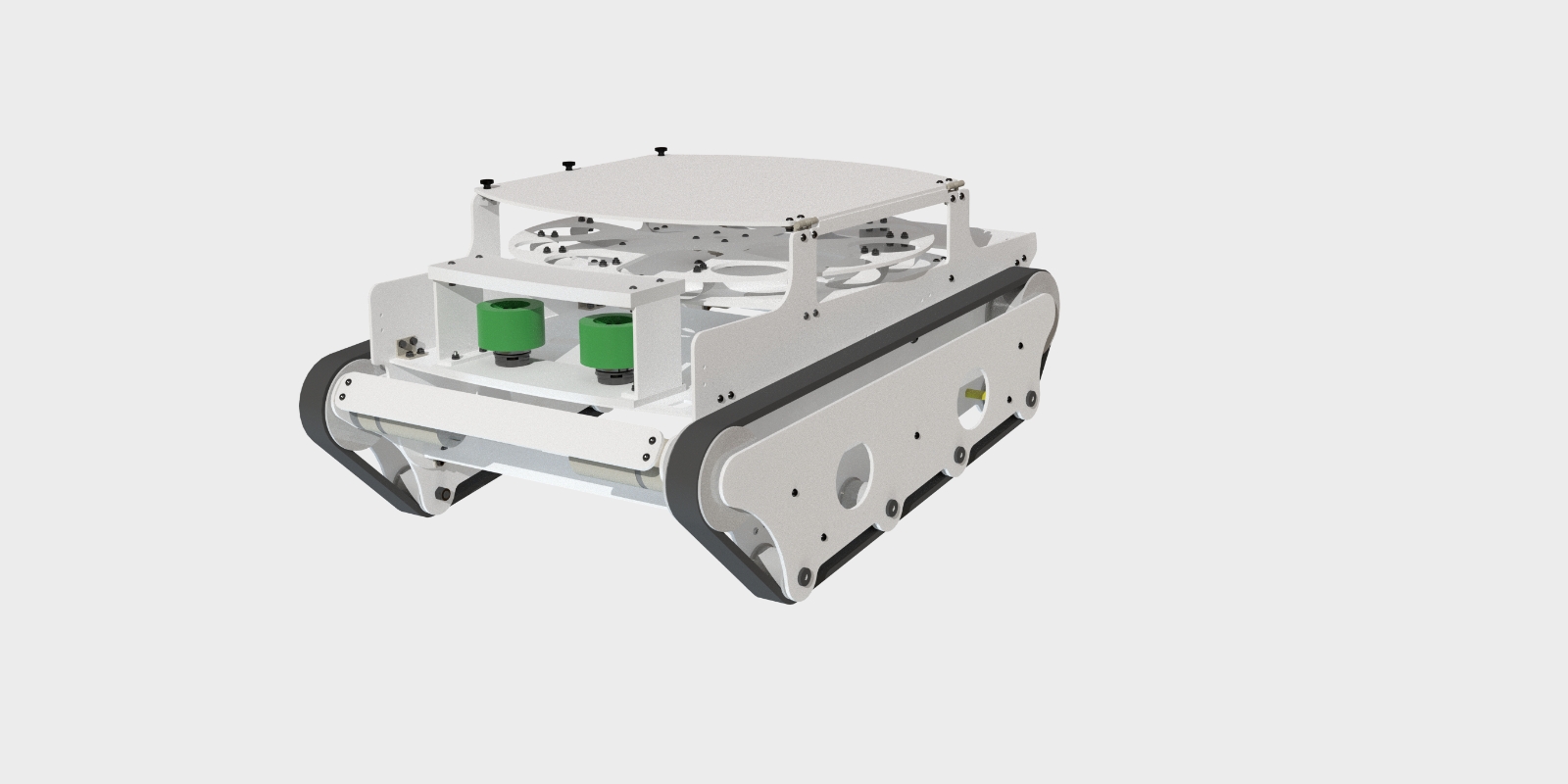

产品介绍
射击机器人包含轮式射击机器人和履带射击机器人。讲解了射击机器人的机械设计、运动控制、射击机构控制原理。机器人可以分别搭配标准尺寸轮毂底盘、履带式底盘。
课程内容分为应用场景需求分析,底盘运动学结构设计和控制原理、远程射击和供弹机械结构设计和控制原理,机器人远程射击对抗实践。
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力, 电控系统搭建能力等。对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课 与综合实践课,适合有一定专业学习基础、致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |
产品介绍
自动机器人讲解自动机器人的机械设计、传感和控制系统、控制思想和算法实现。
课程内容分为:应用场景需求分析、自动机器人机械结构设计、运动学控制原理,传感器检测和控制系统原理、比赛自动机器人控制思想和算法实现,自动机器人应用实践。
课程内容
对抗机器人作为一个复杂的半自动化机器控制系统,是跨学科综合知识相结合的成果,在设计制作学习使用中锻炼了学习者的结构设计能力, 电控系统搭建能力等。对抗机器人课程定位于中高职、专本科院校机械专业、物联网、智能制造、机器人、自动化、计算机相关专业的基础课 与综合实践课,适合有一定专业学习基础、致力于在人工智能相关行业发展的专本科学生,可适应机械设计、硬件开发、实操实践等岗位技术与管理等职业需求。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 机器人与ROBOTAC赛事概述 |
| 1.2 实训:认识自主控制机器人Autobot | |
| 第二章 机器人的运动机械系统 | 2.1 竞技机器人的运动及攻击结构设计 |
| 2.2 机器人机械材料加工与设计 | |
| 2.3 实训:自主控制机器人机械结构设计 | |
| 2.4 实训:传感器的布局设计与标定 | |
| 第三章 机器人的驱动控制系统 | 3.1 机器人动力系统 |
| 3.2 机器人运动控制 | |
| 3.3 实训:竞技机器人电子电路设计 | |
| 第四章 通信与交互原理 | 4.1 机器人通信机制 |
| 4.2 人机交互原理 | |
| 4.3 实训:自主控制机器人软件设计 | |
| 第五章 机器人感知系统 | 5.1 传感器原理及应用 |
| 5.2 实训:机器人巡线实践 | |
| 5.3 实训:机器人环境感知实践 | |
| 第六章 ROBOTAC竞赛策略 | 6.1 竞技机器人ROBOTAC参赛策略 |
| 6.2 实训:综合竞赛实战——攻击实践 | |
| 6.3 实训:综合竞赛实战——布障实践 |

