智能无人驾驶
“智能无人驾驶”包含无人驾驶实训原理实践及配套实训平台,采用多传感器融合技术感知,实现车辆无人驾驶相关功能。 课程将电子电路、嵌入式系统开发、多传感器信息基础等多种内容融入教学,使用自主研发的IDE实现图形化编程,理论课程与软硬件实训相结合, 促进学生掌握无人驾驶技术,培养无人驾驶领域人才。
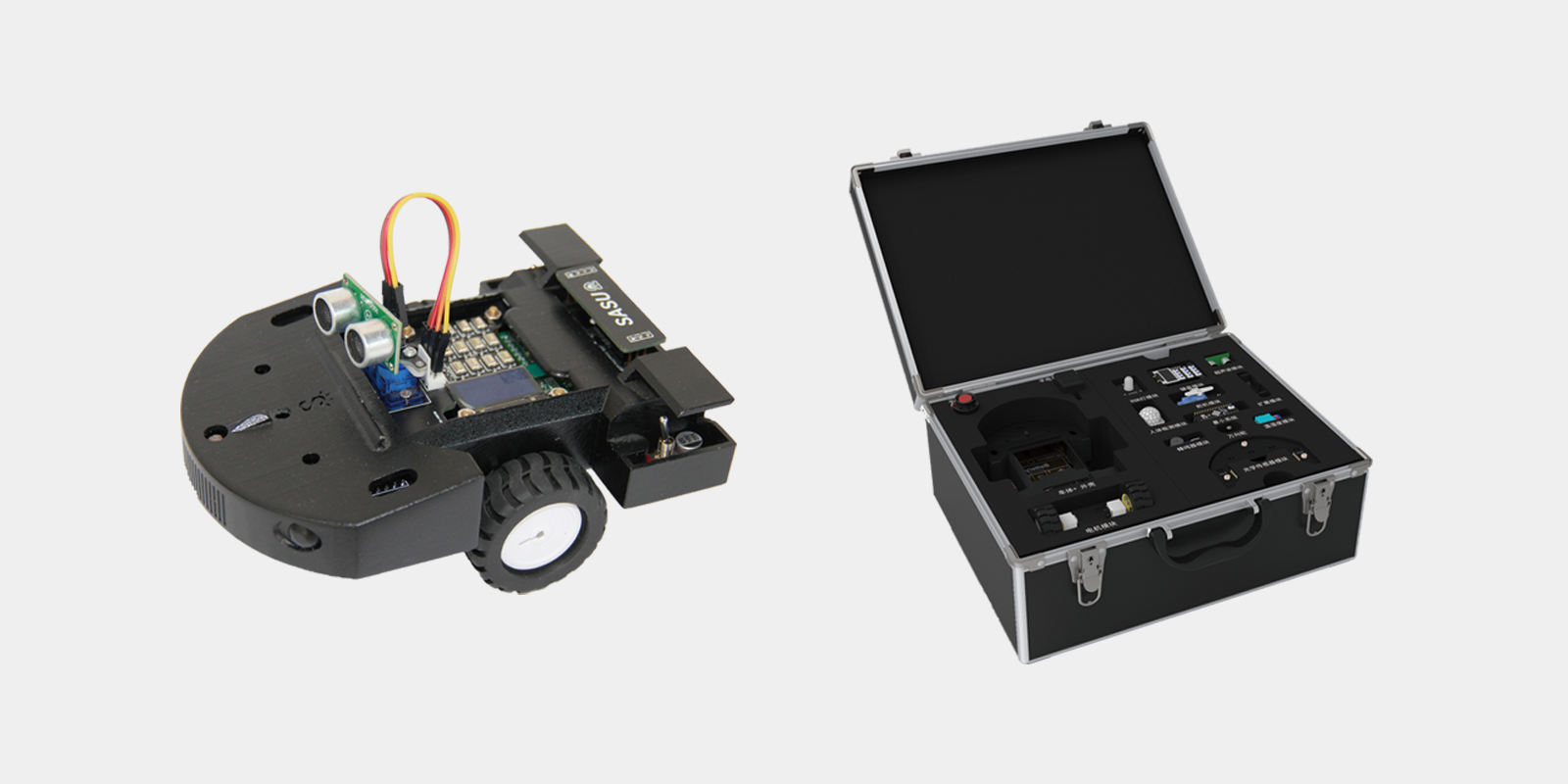
平台采用多传感器融合技术感知,自主规划行车路线并控制车辆到达预定位置。
自主研发的IDE实现图像化编程,学生可通过拖拽式进行代码编写也可通过直接编写C语言实现功能。
智能无人驾驶课程的学习需要学习者可对高等数学、线性代数、运筹学等基础科学知识有较为直观的理解;对电路原理,嵌入式系统编程等核心工程基础知识有较为熟练的实际应用能力;对环境感知,多传感器信息融合技术等工程基础知识有较为深入的理解与实践。课程定位于各中高职、专本科院校自动化、机械、计算机、电子类、人工智能等相关专业的专业基础课与综合实践课,已修完先修课程的学生均可学习本课程。本课程亦可作为人工智能爱好者的课外读物与实践参考手册。
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 无人驾驶技术概述 |
| 第二章 无人驾驶系统组成 | 2.1 无人驾驶体系架构与实训平台简介 |
| 2.2 实训:无人驾驶实训平台机械组装实践 | |
| 2.3 实训:无人驾驶实训平台电路实践 | |
| 第三章 车辆交互体系设计 | 3.1 发光二极管及发光原理 |
| 3.2 实训:彩灯控制逻辑 | |
| 3.3 键盘及显示器工作原理 | |
| 3.4 实训:键盘交互控制逻辑 | |
| 3.5 扬声器与蜂鸣器控制原理 | |
| 3.6 实训:蜂鸣器交互控制逻辑 | |
| 第四章 环境感知系统 | 4.1 车辆雷达系统与超声波传感器 |
| 4.2 实训:超声波雷达控制 | |
| 4.3 实训:超声避障自动驾驶 | |
| 4.4 人体红外线检测传感器原理 | |
| 4.5 实训:人体检测交互控制逻辑 | |
| 4.6 车辆温湿度检测原理 | |
| 4.7 实训:无人驾驶环境检测 | |
| 4.8 红外巡线导航原理 | |
| 4.9 实训:红外巡线实践 | |
| 第五章 车辆通信模块应用 | 5.1 无线通信与蓝牙技术 |
| 5.2 实训:蓝牙遥控驾驶 | |
| 第六章 车辆决策与控制 | 6.1 车辆驱动系统与底盘控制原理 |
| 6.2 实训:无人驾驶运动控制 | |
| 6.3 车辆伺服系统与舵机控制原理 | |
| 6.4 实训:舵机转角控制 | |
| 6.5 车辆光学导航原理 | |
| 6.6 实训:无人驾驶追光实践 | |
| 第七章 无人驾驶系统实现 | 7.1 实训:巡线行驶 |
本课程定位于中高职、专本科院校人工智能、自动驾驶、智能制造、自动化、计算机、车辆控制等相关专业的专业基础课与实践选修课。

