人工智能机器鼠
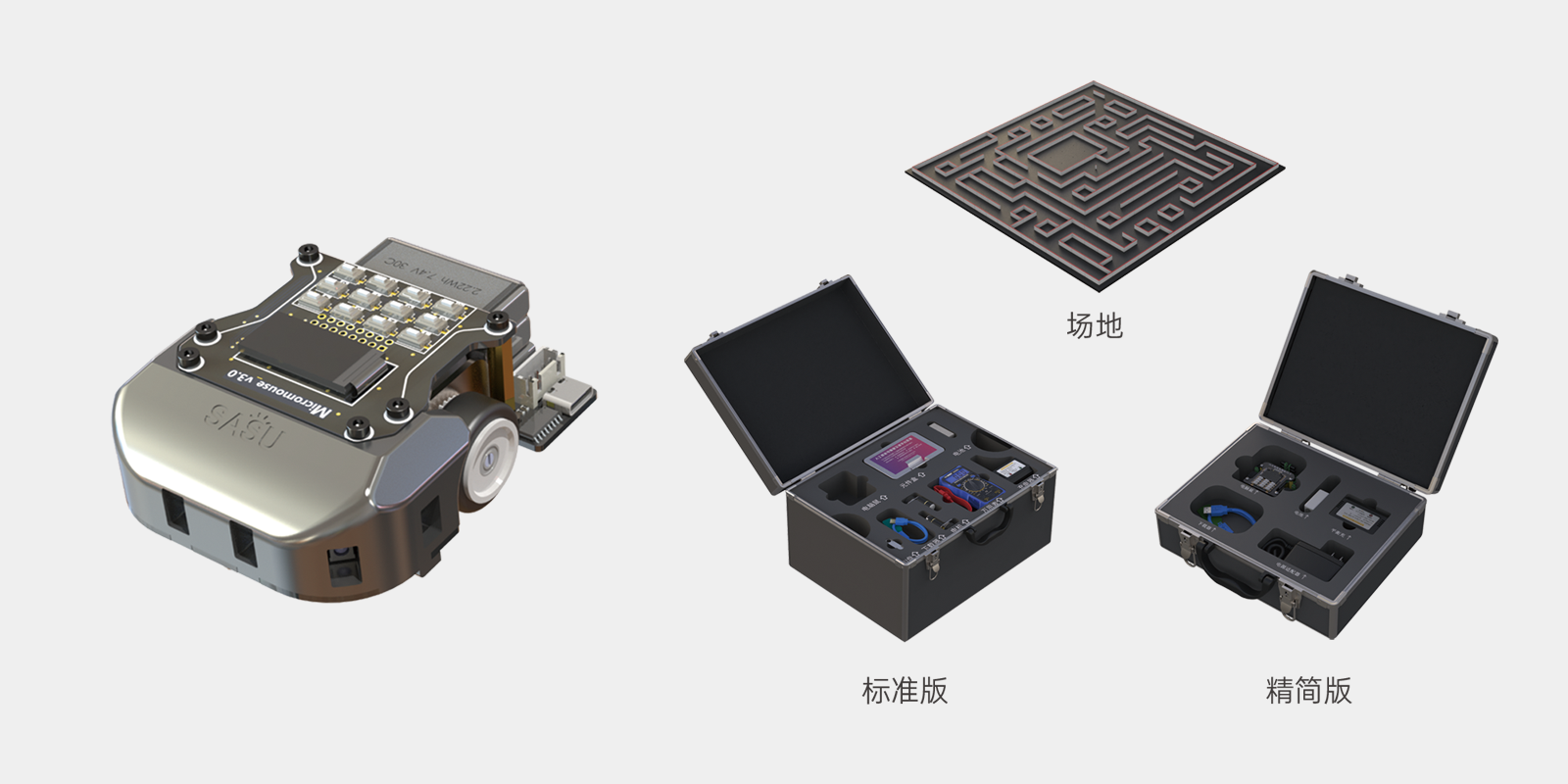
“人工智能机器鼠”讲解机器鼠从设计、焊接、制作到算法调试的原理及实践内容,通过实现搜索迷宫、寻找最短路径等功能, 促进在实践过程中掌握计算智能方法、搜索、路径规划等算法应用。标准版配备焊接材料,可实现完整机器鼠制作。精简版不含焊接材料, 可直接调试算法。课程配备完善的课程资料,包括课程指南、学习指导书、实训手册、教学课件、实践代码以及考核资料包,便于授课学习。
参加人工智能机器鼠走迷宫竞赛。
人工智能机器鼠是通过传感器、人工智能和电子电路技术的集成,使人工智能机器鼠能够模仿人类智能。
人工智能机器鼠以“理论一实践一研究”软硬件教学资源为主轴协同培养创新,是辅助教师人工智能技术基础应用能力的重要途径。
人工智能机器鼠的高效运行,离不开人工智能和嵌入式系统,这两大核心技术涉及多个方向的理论知识。人工智能机器鼠课程定位于中高职、 专本科院校人工智能、电子工程、机械工程、自动化、计算机相关专业的专业基础课与综合实践课,适合有一定专业学习基础、 致力于培养在人工智能相关行业发展的专本科学生,可适应嵌入式系统、硬件开发、算法研发、实操实践等岗位技术与管理等职业需求。
精简版
| 章 | 节 |
|---|---|
| 第一章 电脑鼠概述 | 1.1 电脑鼠发展与人工智能概述 |
| 1.2 实训:电脑鼠实训环境配置 | |
| 第二章 信息感知系统 | 2.1 电脑鼠信息感知原理及传感器应用 |
| 2.2 实训:电脑鼠传感器应用实践 | |
| 第三章 嵌入式控制系统 | 3.1 嵌入式微控制系统的硬件结构 |
| 3.2 电脑鼠的主控电路设计思路 | |
| 3.3 电脑鼠行走结构与控制策略 | |
| 3.4 实训:电脑鼠运动控制实践 | |
| 第四章 环境建模与决策 | 4.1 迷宫环境建模基本原理 |
| 4.2 实训:迷宫环境建模实践 | |
| 第五章 路径搜索策略 | 5.1 盲目式搜索基础法则 |
| 5.2 盲目式搜索算法——深度优先算法 | |
| 5.3 盲目式搜索算法——广度优先算法 | |
| 5.4 实训:向心法则搜索实践 | |
| 5.5 实训:深度优先搜索实践 | |
| 5.6 经典启发式搜索——A*算法原理 | |
| 5.7 实训:基于A*算法搜索迷宫实践 | |
| 5.8 等高图与洪水算法 | |
| 5.9 实训:利用广度优先算法制作等高图 | |
| 5.10 实训:利用深度优先算法制作等高图 | |
| 第六章 智能搜索算法 | 6.1 遗传算法起源及基本原理 |
| 6.2 基于遗传算法抉择迷宫最优路径 | |
| 6.3 实训:遗传算法实践 | |
| 6.4 粒子群算法基本原理 | |
| 6.5 基于粒子群抉择迷宫最优路径 | |
| 6.6 实训:粒子群算法实践 | |
| *第七章 数据结构与算法基础 | 7.1 数据结构:线性表与树 |
| 7.2 数据结构:图 | |
| 7.3 递归算法详解 |
标准版
| 章 | 节 |
|---|---|
| 第一章 绪论 | 1.1 电脑鼠起源与电脑鼠竞赛 |
| 1.2 电脑鼠与人工智能 | |
| 第二章 电脑鼠实训平台配置 | 2.1 电脑鼠焊接及组装理论 |
| 2.2 实训:电脑鼠焊接及组装实践 | |
| 2.3 实训:电脑鼠软件开发环境配置 | |
| 2.4 实训:软件测试与电脑鼠基础运动调试 | |
| 第三章 电脑鼠组成架构 | 3.1 嵌入式控制系统概述 |
| 3.2 主控系统与主控电路 | |
| 3.3 控制逻辑与代码实例 | |
| 3.4 环境感知系统与红外传感器 | |
| 3.5 红外传感器的控制逻辑与代码实例 | |
| 3.6 电机使用基本原理 | |
| 3.7 电脑鼠驱动电路 | |
| 第四章 环境搜索策略 | 4.1 盲目式搜索基础法则 |
| 4.2 深度优先算法详解 | |
| 4.3 广度优先算法详解 | |
| 4.4 实训:向心法则搜索迷宫 | |
| 4.5 实训:深度优先算法搜索迷宫 | |
| 第五章 环境建模基本方法 | 5.1 环境坐标建立及方向转换 |
| 5.2 迷宫环境建模中的墙壁存储策略 | |
| 5.3 迷宫环境中的等高图制作 | |
| 第六章 智能算法原理及应用 | 6.1 启发式搜索与A*算法原理 |
| 6.2 遗传算法起源及基本原理 | |
| 6.3 基于遗传算法抉择迷宫最优路径 | |
| 6.4 粒子群算法基本原理 | |
| 6.5 基于粒子群抉择迷宫最优路径 | |
| 6.6 实训:A*算法搜索迷宫实验 | |
| 第七章 迷宫路径规划实战 | 7.1 实训:迷宫的路径规划实验 |
本课程定位于计算机、物联网、自动化、人工智能相关专业的专业实训课与实习实践课。

