商服机器人-机械臂版
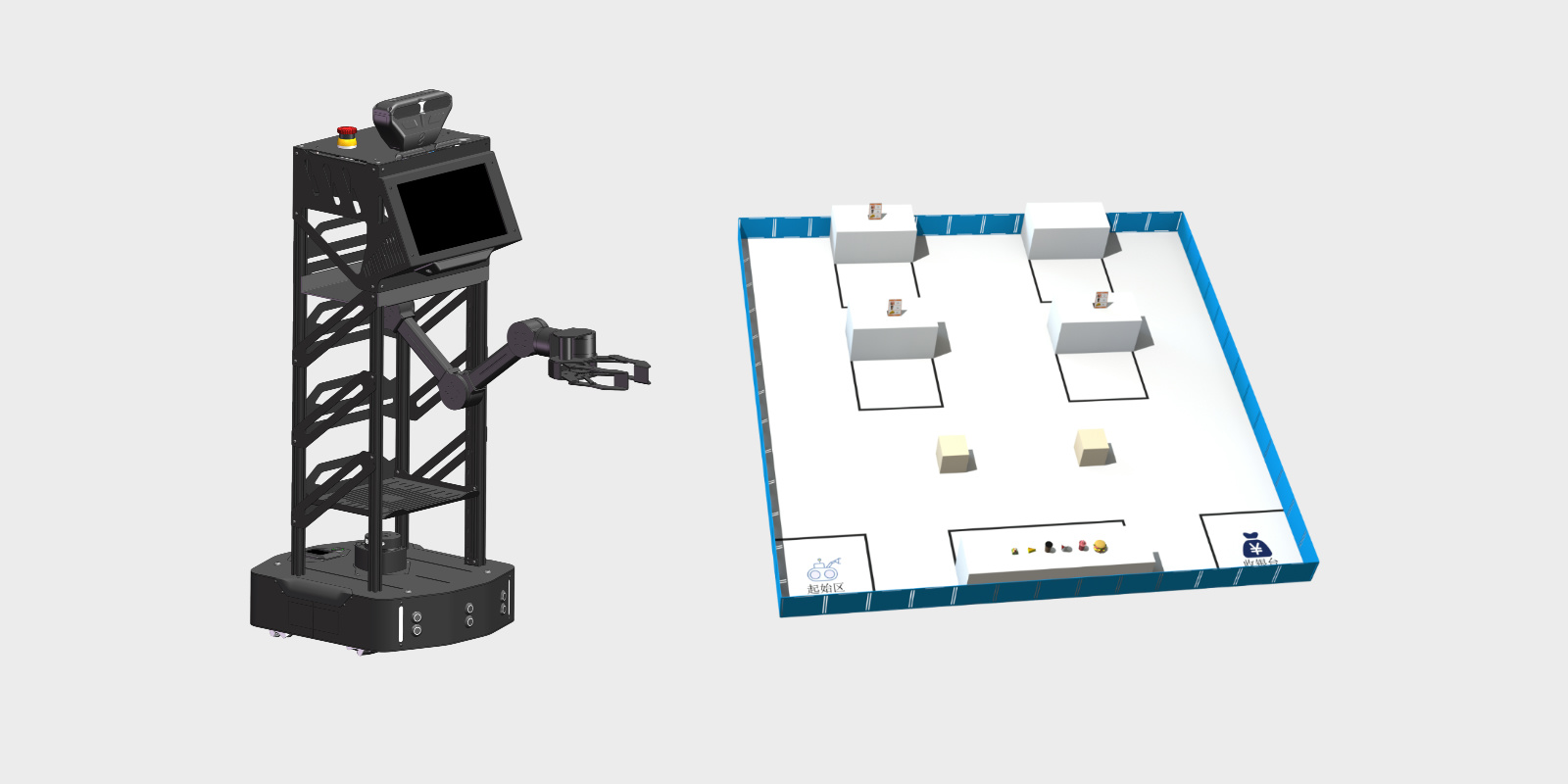
“商服机器人—机械臂版”是中国机器人及人工智能大赛机器人应用赛(智能餐饮服务)参赛平台。机器人能够实现室内建图、 定位导航、路径规划、仿真演示、道路指引、语音交互、人脸/人物检测、智能安控、垃圾巡检与餐饮服务。 支持C++/Python语言编程,基于百度飞桨(PaddlePaddle)Al框架和OpenCV图像处理技术,实现在线Al模型训练、 道路识别以及机器人控制等功能。机器人采用双主控架构,应用级控制器为Edgeboard计算卡,负责复杂算法和机器人 逻辑计算工作,下位机控制器为STM32单片机,负责机器人传感器数据采集、电机PID控制、机器人里程运算、通信转接等工作。 具有机械臂、高清摄像头、显示屏、激光雷达、超声波传感器、陀螺仪、碰撞传感器、编码器、呼吸灯等。
赛事/情景化:基于酒店服务、园林检测与餐饮服务赛事机器人应用场景开展系统化教学,更好地让学生能够思考应用场景。
软件硬件结合:围绕软硬件基础、运动控制、图像识别、大模型、语音识别,机械臂等内容系统开展教学。
理论结合实践:从基础知识入手带领学生初步了解的理论知识点,同时也让学生了解“商服机器人机械臂版”实训平台。
商服机器人机械臂版课程的学习涉及C++语言程序设计、Python语言程序设计、机械设计、机械控制、传感器技术等多方面的基础知识。 课程定位于各中高职、专本科院校自动化、机器人、计算机、电子类、人工智能等相关专业的专业基础课与综合实践课,已修完先修 课程的学生均可学习本课程,本课程亦可作为商服机器人机械臂版爱好者的课外读物与实践参考手册。
商服机器人课程大纲
| 章 | 节 |
|---|---|
| 第1章 ROS机器人操作系统概述 | 1.1 认识迎宾机器人 1.2 机器人概述 1.3 ROS机器人操作系统 1.4 实训:ROS配置与实操 |
| 第2章 即时定位与地图构建 | 2.1 认识传感器 2.2 坐标系构建 2.3 实训:TF构建实验 2.4 SLAM建图 2.5 实训:酒店单层搜索——激光SLAM建图实验 |
| 第3章 运动控制与导航技术应用 | 3.1 移动机器人平台 3.2 运动控制决策 3.3 路径规划 3.4 导航与定位 3.5 实训:配送餐饮——自主定位与导航实验 3.6 实训:机器人仿真实验 |
| 第4章 智能语音技术应用 | 4.1 语音识别技术 4.2 语音交互与TTS 4.3 实训:语音交互实践 |
| 第5章 目标检测与智能跟随 | 5.1 目标检测及应用 5.2 实训:图像采集与数据集准备实验 5.3 实训:基于云端的AI模型训练与本地化部署实验 5.4 实训:垃圾巡检与环境优化实验 5.5 人脸检测基本原理 5.6 实训:人脸检测与智能安控实验 5.7 手势识别与姿态估计 5.8 实训:人体姿态检测实验 5.9 运动跟踪 5.10 实战:智能跟随实验 |
商服机器人课程大纲
课时:36h(理论:7章节,实训:8项)
机械臂课程大纲
| 章 | 节 |
|---|---|
| 第1章 绪论 | 1.1 机械臂概述 1.2 机械臂关键技术 |
| 第2章 位姿描述与坐标变换 | 2.1 机械臂组成与结构 2.2 刚体位姿描述 2.3 坐标系变换 2.4 齐次坐标与变换 |
| 第3章 机械臂运动学解析 | 3.1 运动学分析基础 3.2 D-H参数与坐标系变换 3.3 运动学求解 3.4 实训1:仿真环境配置与模型导入 |
| 第4章 速度建模与分析 | 4.1 连杆速度的传递与计算 4.2 雅可比矩阵构建方法 4.3 速度分析与雅可比矩阵 |
| 第5章 关节驱动与伺服控制 | 5.1 机器人驱动系统概述 5.2 关节驱动电机 5.3 关节伺服控制 |
| 第6章 机械臂轨迹规划 | 6.1 运动规划概述 6.2 关节空间规划方法 6.3 笛卡尔空间规划方法 6.4 实训2:机械臂控制及路径规划仿真 6.5 实训3:编程控制仿真机械臂 |
| 第7章 机械臂分析与智能控制 | 7.1 机器学习在机器人中的应用 7.2 深度学习与计算机视觉 7.3 传感器技术 7.4 实训4:自主导航仿真与实操 7.5 实训5:自主点餐编程实验 7.6 实训6:机械臂取餐实验 7.7 实训7:智能结算编程实验 7.8 实训8:智能餐饮服务实现 |
本课程定位于高职高专、本科院校自动化、机器人、计算机、电子类、人工智能等相关专业。

