智能工业机械臂
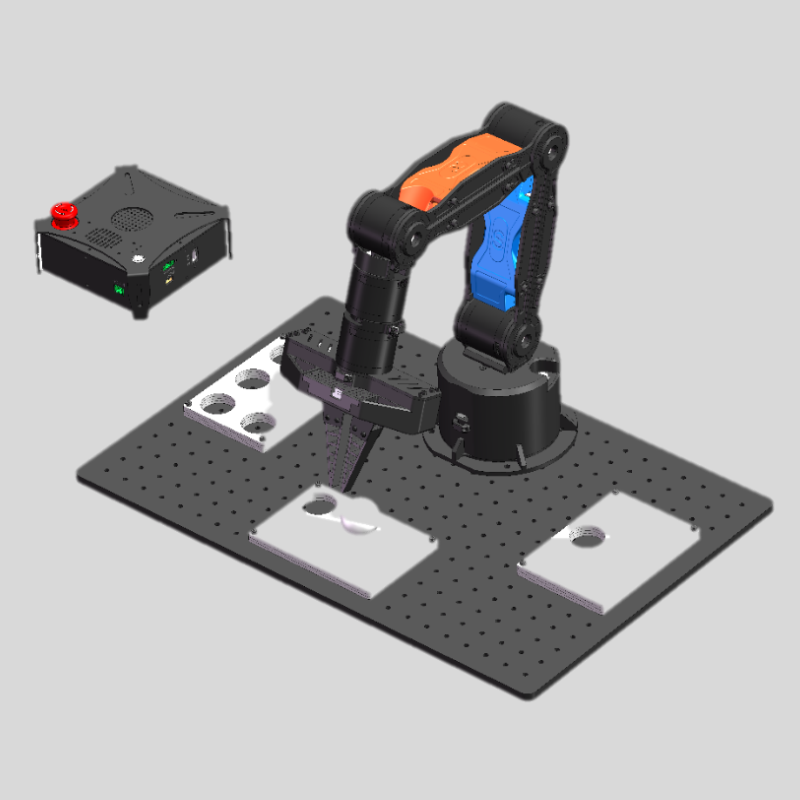
智能工业机械臂由机械臂、边缘计算AI盒、上位机软件及调试工具等组成。集传感器、语音识别、三维仿真等众多技术于一体,可实现机械臂控制与多传感器组合应用。 机械臂与上位机配合可实现机械臂不同动作的控制,如夹取、传递、流水线等运动控制功能;边缘计算AI盒为人工智能图像提供算力;调试工具保证了使用者可以便捷地 进行开发调试工作。实训平台提供丰富的硬件资源与软件系统,保障学生能够充分掌握机械臂系统开发技术与人工智能技术。
运行控制:智能跟随、正/逆运动学解算、路径规划。
AI与视觉:相机标定、目标检测、图像标定、透视变换。
语音交互:语音识别、语音合成、大语音模型。
三维仿真:模型显示、逆解算仿真、路径规划仿真。
智能场景:智能仓储、工业分拣。
| 章 | 节 |
|---|---|
| 第1章 机械臂概论 | 1.1 机械臂发展概述 1.2 机械臂组成结构 1.3 工业机械臂核心技术 1.4 实训1:开发环境配置与机械臂使用 |
| 第2章 位姿描述与空间变换 | 2.1 位姿描述与坐标变换 2.2 齐次变换 2.3 空间旋转与变换 |
| 第3章 机械臂运动学解析 | 3.1 运动学分析基础 3.2 正运动学求解 3.3 逆运动学求解 3.4 机器人运动仿真技术 3.5 实训2:机械臂运动学仿真实验 |
| 第4章 机械臂动力学分析 | 4.1 机器人动力学概述 4.2 速度分析与雅可比矩阵 4.3 机器人动力学应用 4.4 实训3:机械臂模型预测仿真控制实验 |
| 第5章 高精度关节控制技术 | 5.1 机器人驱动系统概述 5.2 驱动电机及减速器 5.3 高精度电机控制技术 5.4 实训4:机械臂关节电机控制 |
| 第6章 机械臂轨迹规划 | 6.1 运动规划与轨迹规划 6.2 关节空间规划方法 6.3 笛卡尔空间规划方法 6.4 实训5:机械臂轨迹规划仿真及实操 |
| 第7章 机器视觉与AI应用 | 7.1 机器视觉概述 7.2 数字图像处理技术 7.3 深度学习与视觉算法 7.4 智能语音技术应用 7.5 大模型应用 7.4 实训6:机械臂目标检测及视觉跟随实验 7.5 实训7:大语言模型应用与语音交互实验 |
| 综合实践 | 实训8:基于视觉的智能仓储分拣实验 |
本课程定位于自动化、机械、计算机、电子类、人工智能等相关专业的专业基础课与综合实践课。

