智能视觉机械臂
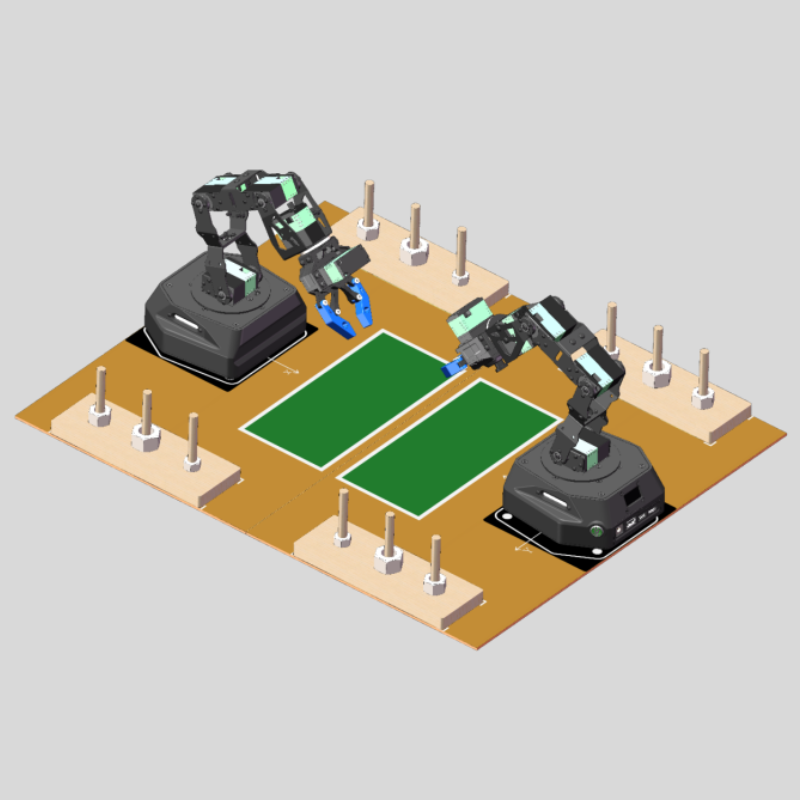
智能视觉机械臂系统集成了机械臂结构、舵机、摄像头、上位机软件、场地及调试工具,其核心由STM32F单片机驱动的下位机舵机控制系统构成。PC端的Ubuntu虚拟机则承载了机械臂的正逆运动学模型、控制算法、目标检测等核心算法系统。5个独立可控的自由度及1个夹爪自由度,实现了精准的抓取与运输功能。同时,结合RGB摄像头捕捉图像,融入了目标检测、目标跟踪等机器视觉技术。其主要功能涵盖运动控制、姿态调整、三维仿真模拟、AI与视觉处理、以及人机交互界面,并适配于实践教学应用。
运行控制:智能跟随、目标跟踪、正/逆运动学解算、路径规划。
A1与视觉:相机标定、目标检测、图像标定、透视变换。
三维仿真:模型显示、逆解算仿真、路径规划仿真。
智能场景:智能码垛、智能分拣。
| 章 | 节 |
|---|---|
| 第1章 机械臂概论 | 1.1 机械臂发展概述 1.2 机械臂组成结构 1.3 机械臂关键技术 1.4 实训1:开发环境配置与机械臂使用 |
| 第2章 位姿描述与空间变换 | 2.1 位姿描述与坐标变换 2.2 齐次坐标与变换 2.3 空间旋转与变换 |
| 第3章 机械臂运动学分析 | 3.1 运动学分析基础 3.2 正运动学求解 3.3 逆运动学求解 3.4 实训2:机械臂运动学实操验证 |
| 第4章 机器人仿真技术 | 4.1 仿真技术概述 4.2 仿真系统介绍 4.3 仿真软件使用 4.4 实训3:机械臂姿态控制仿真实验 |
| 第5章 机械臂驱动与控制 | 5.1 电机工作原理 5.2 伺服控制技术 5.3 总线舵机控制 5.4 实训4:机械臂关节舵机控制实验 |
| 第6章 机械臂轨迹规划 | 6.1 运动规划与轨迹规划 6.2 关节空间规划方法 6.3 笛卡尔空间规划方法 6.4 实训5:路径规划仿真与实操实验 |
| 第7章 机器视觉应用 | 7.1 机器视觉概述 7.2 数字图像处理技术 7.3 深度学习与视觉算法 7.4 实训6:视觉检测与目标跟随实验 7.5 实训7:基于机器视觉的智能码垛实验 |
| 综合实训(期末考核) | 实训8:智能产线上的自动分拣实验设计与实现 |
本课程定位于高职、专本科院校自动化、机械、计算机、电子类、人工智能等相关专业的专业基础课与综合实践课。

