智慧交通沙盘
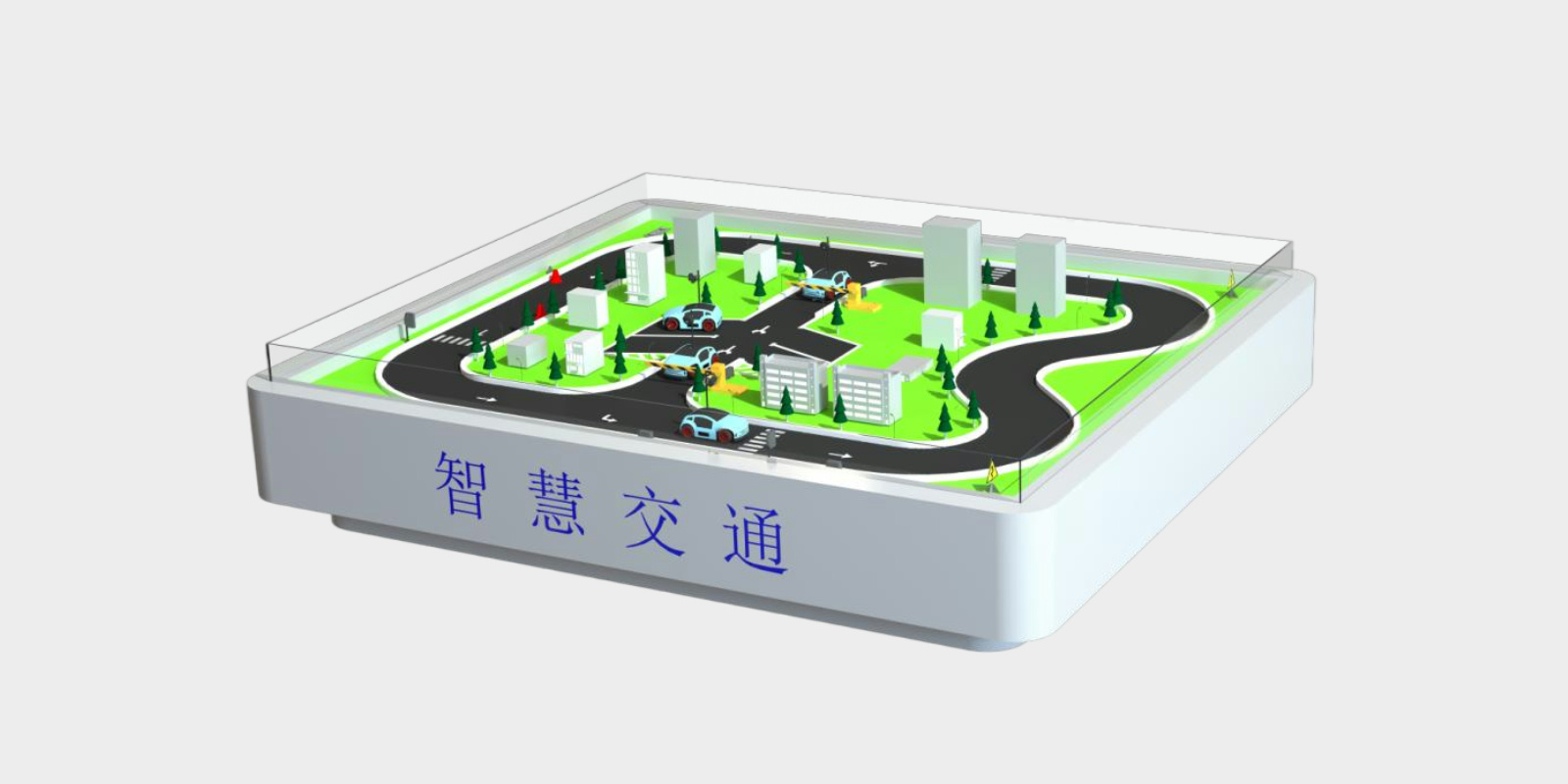
“智慧交通沙盘”是一套能实现智能网联与无人驾驶综合沙盘的智能交通道路系统,它以无线通信、传感器检测等技术为基础,实现车辆信息的交互获取和共享,以信息 技术实现人、车、协调、一体化的综合管控。能够帮助学生开发包括协作式优先车辆通行、智能信控等各项功能。
“智慧交通沙盘”包括智慧路网系统、智能汽车、智慧交互系统等部分。智慧路网系统模拟真实的道路环境和交通设施,为智能车提供运行载体。智能车则通过车载传 感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标。智慧交互系统则允许学生通过程序对沙盘场景进行操作,例如改变车辆速度、调整信号灯时间等, 从而实现与沙盘的实时互动。
沙盘场景:灯光电路、绿化及建筑、交通场景、等相关场景内容。
路径规划:基于贝塞尔(Bezier)曲线的加权轨迹规划。
目标检测:基于Yolo-v3的多目标实时检测(FPS<60ms,Map>90%)。
图像处理:摄像头校正,车道线识别,元素识别、图像测量。
运动控制:闭环PID速度控制和PD姿态控制。
课程内容以智能汽车课程为基础,基于“智慧交通沙盘”场景,以项目为驱动采用理论与实践的结合方式促进学生理解掌握。课程内容涵盖课程指南、课程指导书、 实训手册、教学手册、教学课件、考评资料、教学视频、示例资料库等等。
智能汽车课时:48h(理论:6章节,实训:15个项目)
| 章 | 节 |
|---|---|
| 第一章 认识智能汽车 | 实训一 智能汽车配置实验 |
| 第二章 车辆架构与控制 | 实训二 智能汽车图像感知实验 |
| 第三章 赛道图像采集与预处理 | 实训三 图像采集实验 实训四 相机标定与图像校正实验 实训五 道路图像的透视变换实验 实训六 图像预处理实验 |
| 第四章 赛道元素识别模型训练 | 实训七 基于飞桨平台的赛道元素识别模型训练实验 |
| 第五章 赛道检测与识别 | 实训八 赛道与环岛识别实验 实训九 十字路口与车库识别实验 实训十 智能汽车AI模型部署实验 实训十一 基于AI的道路元素识别与检测实验1 实训十二 基于AI的道路元素识别与检测实验2 实训十三 基于AI的道路元素识别与检测实验3 |
| 第六章 智能汽车控制与决策 | 实训十四 智能汽车控制与决策实验 实验室五 智能汽车行驶竞技实战 |
智能汽车
智慧交通与自动驾驶课程:18h(理论:3章节,实践:6个项目)
| 章 | 节 |
|---|---|
| 第一章 智慧交通概论 | 1.1 智慧交通发展概况 1.2 智慧交通系统架构 1.3 智能交通产业案例 实训1:交通沙盘与开发环境操作实验 |
| 第二章 智慧交通核心技术 | 2.1 车联网(V2X)技术 2.2 深度学习与人工智能(AI)技术 2.3 大数据与云计算 2.4 高精度定位与导航技术 实训2:AI目标检测模型训练与部署 |
| 第三章 车路协同与交通监测 | 3.1 交通数据采集与信息交互 3.2 车路协同系统构建 3.3 交通仿真技术应用 实训3:数据采集与车路交互 实训4:车路协同与自动驾驶实验 实训5:智能泊车技术实现 实训6:无人驾驶仿真优化实验 |
智慧交通与自动驾驶
本课程定位于机电、计算机、自动化、人工智能、物联网、车辆控制等专业。有兴趣参加全国大学生智能汽车竞赛的在校大学生。

